如果你也在 怎样代写多体物理many-body physics这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。多体物理many-body physics多体问题是一大类物理问题的总称,涉及由许多相互作用的粒子组成的微观系统的特性。这里的微观意味着必须使用量子力学来提供系统的准确描述。许多可以是三到无穷大的任何地方(在实际上是无限的、均匀的或周期性的系统的情况下,如晶体),尽管三体和四体系统可以通过特定的手段(分别是法德耶夫和法德耶夫-雅库博夫斯基方程)来处理,因此有时被单独归类为少数体系统。
多体物理many-body physics一般来说,虽然支配每个单独粒子运动的基本物理规律可能(或可能不)简单,但对粒子集合的研究可能极其复杂。在这样一个量子系统中,粒子之间的重复相互作用产生了量子关联,或纠缠。因此,该系统的波函数是一个复杂的对象,持有大量的信息,这通常使得精确或分析计算不切实际,甚至不可能。因此,多体理论物理学最常依靠的是一套针对手头问题的近似值,并且是科学中计算量最大的领域之一。
my-assignmentexpert™多体物理many-body physics作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的多体物理many-body physics作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此多体物理many-body physics作业代写的价格不固定。通常在经济学专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在物理physics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的物理physics代写服务。我们的专家在多体物理many-body physics代写方面经验极为丰富,各种多体物理many-body physics相关的作业也就用不着 说。
我们提供的多体物理many-body physics及其相关学科的代写,服务范围广, 其中包括但不限于:
物理代写|多体物理作业代写many-body physics代考|Classical Lattice Dynamics
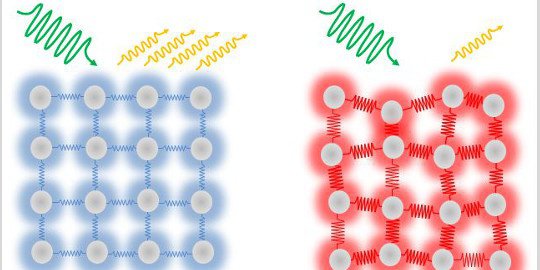
Consider the lattice of ions in a solid. Suppose the equilibrium positions of the ions are the sites $\vec{R}{i}$. Let us describe small displacements from these sites by a displacement field $\vec{u}\left(\vec{R}{i}\right)$. We will imagine that the crystal is just a system of masses connected by springs of equilibrium length $a$.
At length scales much longer than its lattice spacing, a crystalline solid can be modelled as an elastic medium. We replace $\vec{u}\left(\vec{R}{i}\right)$ by $\vec{u}(\vec{r}$ ) (i.e. we replace the lattice vectors, $\vec{R}{i}$, by a continuous variable, $\vec{r}$ ). Such an approximation is valid at length scales much larger than the lattice spacing, $a$, or, equivalently, at wavevectors $q \ll$ $2 \pi / a$.
The potential energy of the elastic medium must be translationally and rotationally invariant (at shorter distances, these symmetries are broken to discrete lattice symmetries, but let’s focus on the long-wavelength physics for now). Translational invariance implies $V\left[\vec{u}+\vec{u}{0}\right]=V[\vec{u}]$, so $V$ can only be a function of the derivatives, $\partial{i} u_{j}$. Rotational invariance implies that it can only be a function of the symmetric combination,
$$
u_{i j} \equiv \frac{1}{2}\left(\partial_{i} u_{j}+\partial_{j} u_{i}\right)
$$
There are only two possible such terms, $u_{i j} u_{i j}$ and $u_{k k}^{2}$ (repeated indices are summed). A third term, $u_{k k}$, is a surface term and can be ignored. Hence, the action of a crystalline solid to quadratic order, viewed as an elastic medium, is:
$$
S_{0}=\int d t d^{3} \vec{r} \mathcal{L}=\frac{1}{2} \int d t d^{3} \vec{r}\left[\rho\left(\partial_{t} u_{i}\right)^{2}-2 \mu u_{i j} u_{i j}-\lambda u_{k k}^{2}\right]
$$
where $\rho$ is the mass density of the solid and $\mu$ and $\lambda$ are the Lamé coefficients. Under a dilatation, $\vec{u}(\vec{r})=\alpha \vec{r}$, the change in the energy density of the elastic medium is $\alpha^{2}(\lambda+2 \mu / 3) / 2$; under a shear stress, $u_{x}=\alpha y, u_{y}=u_{z}=0$, it is $\alpha^{2} \mu / 2$. In a crystal – which has only a discrete rotational symmetry – there may be more parameters than just $\mu$ and $\lambda$, depending on the symmetry of the lattice. In a crystal with cubic symmetry, for instance, there are, in general, three independent parameters. We will make life simple, however, and make the approximation of full rotational invariance.
物理代写|多体物理作业代写many-body physics代考|The Normal Modes of a Lattice
Let us expand the displacement field in terms of its normal-modes. The equations of motion which follow from (3.2) are:
$$
\rho \partial_{t}^{2} u_{i}=(\mu+\lambda) \partial_{i} \partial_{j} u_{j}+\mu \partial_{j} \partial_{j} u_{i}
$$
The solutions,
$$
u_{i}(\vec{r}, t)=\epsilon_{i} e^{i(\vec{k} \cdot \vec{r}-\omega t)}
$$
Chapter 3: Phonons and Second Quantization
17
where is a unit polarization vector, satisfy
$$
-\rho \omega^{2} \epsilon_{i}=-(\mu+\lambda) k_{i}\left(k_{j} \epsilon_{j}\right)-\mu k^{2} \epsilon_{i}
$$
For longitudinally polarized waves, $k_{i}=k \epsilon_{i}$,
$$
\omega_{k}^{l}=\pm \sqrt{\frac{2 \mu+\lambda}{\rho}} k \equiv \pm v_{l} k
$$
while transverse waves, $k_{j} \epsilon_{j}=0$ have
$$
\omega_{k}^{t}=\pm \sqrt{\frac{\mu}{\rho}} k \equiv \pm v_{s} k
$$
Hence, the general solution of (3.3) is of the form:
$$
u_{i}(\vec{r}, t)=\sum_{k, s} \frac{1}{\sqrt{2 \rho \omega_{k}^{s}}} \epsilon_{i}^{s}\left(a_{\vec{k}, s} e^{i\left(\vec{k} \cdot \vec{r}-\omega_{k}^{s} t\right)}+a_{\vec{k}, s}^{\dagger} e^{-i\left(\vec{k} \cdot \vec{r}-\omega_{k}^{s} t\right)}\right)
$$
$s=1,2,3$ corresponds to the longitudinal and two transverse polarizations. The normalization factor, $1 / \sqrt{2 \rho \omega_{k}^{s}}$, was chosen for later convenience.
物理代写|多体物理作业代写MANY-BODY PHYSICS代考|Canonical Formalism, Poisson Brackets
The canonical conjugate to our classical field, $u_{i}$, is
$$
\pi_{i} \equiv \frac{\partial \mathcal{L}}{\partial\left(\partial_{t} u_{i}\right)}=\rho \partial_{t} u_{i}
$$
The Hamiltonian is given by
$$
\begin{aligned}
H &=\int d^{3} \vec{r} \pi_{i} \partial_{t} u_{i}-\mathcal{L} \
&=\frac{1}{2} \int d^{3} \vec{r}\left[\rho\left(\partial_{t} u_{i}\right)^{2}+2 \mu u_{i j} u_{i j}+\lambda u_{k k}^{2}\right] \
&=\frac{1}{2} \int d^{3} \vec{r}\left[\frac{1}{\rho} \pi_{i}^{2}+2 \mu u_{i j} u_{i j}+\lambda u_{k k}^{2}\right]
\end{aligned}
$$
Let us define the functional derivative,
$$
\frac{\delta}{\delta \eta} \int d^{3} \vec{r} \mathcal{F}(\vec{r})=\frac{\partial \mathcal{F}}{\partial \eta}-\frac{\partial \mathcal{F}}{\partial\left(\partial_{i} \eta\right)}
$$
Then the equation of motion for $\pi_{i}$ can be written
$$
\partial_{t} \pi_{i}=-\frac{\delta H}{\delta u_{i}}
$$
while
$$
\partial_{t} u_{i}=\frac{\delta H}{\delta \pi_{i}}
$$
From these equations, we see that it is natural to define the Poisson brackets:
$$
[U, V]{\mathrm{PB}}=\int d^{3} \vec{r}\left(\frac{\delta U}{\delta u{i}} \frac{\delta V}{\delta \pi_{i}}-\frac{\delta U}{\delta \pi_{i}} \frac{\delta V}{\delta u_{i}}\right)
$$
With this definition,
$$
\left[u_{j}(\vec{r}), \pi_{i}\left(\overrightarrow{r^{\prime}}\right)\right]{\mathrm{PB}}=\delta\left(\vec{r}-\vec{r}^{\prime}\right) $$ and $$ \begin{aligned} \partial{t} \pi_{i} &=\left[\pi_{i}, H\right]{\mathrm{PB}} \ \partial{t} u_{i} &=\left[u_{i}, H\right]_{\mathrm{PB}}
\end{aligned}
$$
多体物理代写
物理代写|多体物理作业代写MANY-BODY PHYSICS代考|CLASSICAL LATTICE DYNAMICS
考虑固体中的离子晶格。假设离子的平衡位置是位点 $\vec{R}{i}$. Let us describe small displacements from these sites by a displacement field $\vec{u}\left(\vec{R}{i}\right)$. We will imagine that the crystal is just a system of masses connected by springs of equilibrium length $a$.
在比其晶格间距长得多的长度尺度上,可以将结晶固体建模为弹性介质。我们替换$\vec{u}\left(\vec{R}{i}\right)$ by $\vec{u}(\vec{r}$ ) (i.e. we replace the lattice vectors, $\vec{R}{i}$, by a continuous variable, $\vec{r}$ ). Such an approximation is valid at length scales much larger than the lattice spacing, $a$, or, equivalently, at wavevectors $q \ll$ $2 \pi / a$.
弹性介质的势能必须是平移和旋转不变的$$
u_{i j} \equiv \frac{1}{2}\left(\partial_{i} u_{j}+\partial_{j} u_{i}\right)
$$
There are only two possible such terms, $u_{i j} u_{i j}$ and $u_{k k}^{2}$ (repeated indices are summed). A third term, $u_{k k}$, is a surface term and can be ignored. Hence, the action of a crystalline solid to quadratic order, viewed as an elastic medium, is:
$$
S_{0}=\int d t d^{3} \vec{r} \mathcal{L}=\frac{1}{2} \int d t d^{3} \vec{r}\left[\rho\left(\partial_{t} u_{i}\right)^{2}-2 \mu u_{i j} u_{i j}-\lambda u_{k k}^{2}\right]
$$
where $\rho$ is the mass density of the solid and $\mu$ and $\lambda$ are the Lamé coefficients. Under a dilatation, $\vec{u}(\vec{r})=\alpha \vec{r}$, the change in the energy density of the elastic medium is $\alpha^{2}(\lambda+2 \mu / 3) / 2$; under a shear stress, $u_{x}=\alpha y, u_{y}=u_{z}=0$, it is $\alpha^{2} \mu / 2$. In a crystal – which has only a discrete rotational symmetry – there may be more parameters than just $\mu$ and $\lambda$,,取决于晶格的对称性。例如,在具有立方对称性的晶体中,通常有三个独立的参数。然而,我们将使生活变得简单,并近似于完全旋转不变性。
物理代写|多体物理作业代写MANY-BODY PHYSICS代考|THE NORMAL MODES OF A LATTICE
让我们根据其正常模式扩展位移场。运动方程从3.2是:
$$
\rho \partial_{t}^{2} u_{i}=(\mu+\lambda) \partial_{i} \partial_{j} u_{j}+\mu \partial_{j} \partial_{j} u_{i}
$$
The solutions,
$$
u_{i}(\vec{r}, t)=\epsilon_{i} e^{i(\vec{k} \cdot \vec{r}-\omega t)}
$$
Chapter 3: Phonons and Second Quantization
17
where is a unit polarization vector, satisfy
$$
-\rho \omega^{2} \epsilon_{i}=-(\mu+\lambda) k_{i}\left(k_{j} \epsilon_{j}\right)-\mu k^{2} \epsilon_{i}
$$
For longitudinally polarized waves, $k_{i}=k \epsilon_{i}$,
$$
\omega_{k}^{l}=\pm \sqrt{\frac{2 \mu+\lambda}{\rho}} k \equiv \pm v_{l} k
$$
while transverse waves, $k_{j} \epsilon_{j}=0$ have
$$
\omega_{k}^{t}=\pm \sqrt{\frac{\mu}{\rho}} k \equiv \pm v_{s} k
$$
Hence, the general solution of (3.3) is of the form:
$$
u_{i}(\vec{r}, t)=\sum_{k, s} \frac{1}{\sqrt{2 \rho \omega_{k}^{s}}} \epsilon_{i}^{s}\left(a_{\vec{k}, s} e^{i\left(\vec{k} \cdot \vec{r}-\omega_{k}^{s} t\right)}+a_{\vec{k}, s}^{\dagger} e^{-i\left(\vec{k} \cdot \vec{r}-\omega_{k}^{s} t\right)}\right)
$$
s=1,2,3对应于纵向和两个横向极化。归一化因子,1/2ρωķs, 是为了以后方便而选择的。
物理代写|多体物理作业代写MANY-BODY PHYSICS代考|CANONICAL FORMALISM, POISSON BRACKETS
我们经典领域的典型共轭,在一世, 是
$$
\pi_{i} \equiv \frac{\partial \mathcal{L}}{\partial\left(\partial_{t} u_{i}\right)}=\rho \partial_{t} u_{i}
$$
The Hamiltonian is given by
$$
\begin{aligned}
H &=\int d^{3} \vec{r} \pi_{i} \partial_{t} u_{i}-\mathcal{L} \
&=\frac{1}{2} \int d^{3} \vec{r}\left[\rho\left(\partial_{t} u_{i}\right)^{2}+2 \mu u_{i j} u_{i j}+\lambda u_{k k}^{2}\right] \
&=\frac{1}{2} \int d^{3} \vec{r}\left[\frac{1}{\rho} \pi_{i}^{2}+2 \mu u_{i j} u_{i j}+\lambda u_{k k}^{2}\right]
\end{aligned}
$$
Let us define the functional derivative,
$$
\frac{\delta}{\delta \eta} \int d^{3} \vec{r} \mathcal{F}(\vec{r})=\frac{\partial \mathcal{F}}{\partial \eta}-\frac{\partial \mathcal{F}}{\partial\left(\partial_{i} \eta\right)}
$$
Then the equation of motion for $\pi_{i}$ can be written
$$
\partial_{t} \pi_{i}=-\frac{\delta H}{\delta u_{i}}
$$
while
$$
\partial_{t} u_{i}=\frac{\delta H}{\delta \pi_{i}}
$$
From these equations, we see that it is natural to define the Poisson brackets:
$$
[U, V]{\mathrm{PB}}=\int d^{3} \vec{r}\left(\frac{\delta U}{\delta u{i}} \frac{\delta V}{\delta \pi_{i}}-\frac{\delta U}{\delta \pi_{i}} \frac{\delta V}{\delta u_{i}}\right)
$$
With this definition,
$$
\left[u_{j}(\vec{r}), \pi_{i}\left(\overrightarrow{r^{\prime}}\right)\right]{\mathrm{PB}}=\delta\left(\vec{r}-\vec{r}^{\prime}\right) $$ and $$ \begin{aligned} \partial{t} \pi_{i} &=\left[\pi_{i}, H\right]{\mathrm{PB}} \ \partial{t} u_{i} &=\left[u_{i}, H\right]_{\mathrm{PB}}
\end{aligned}
$$

物理代写|多体物理作业代写many-body physics代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。