如果你也在 怎样代写拓扑物理Physical topology这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。拓扑物理Physical topology物理拓扑结构指的是局域网(LAN)的相互连接的结构。用电缆连接网络上的物理设备的方法,以及使用的电缆类型,都构成了物理拓扑结构。
拓扑物理Physical topology物理网络拓扑结构的例子包括星形、网状、树形、环形、点对点、环形、混合和总线拓扑网络,每一种都由不同的节点和链接配置组成。理想的网络拓扑结构取决于每个企业的大小、规模、目标和预算。
my-assignmentexpert™代数拓扑物理Physical topology作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的拓扑物理Physical topology作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此拓扑物理Physical topology作业代写的价格不固定。通常在经济学专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在物理Physical作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的物理Physical代写服务。我们的专家在拓扑物理Physical topology代写方面经验极为丰富,各种拓扑物理Physical topology相关的作业也就用不着 说。
我们提供的拓扑物理Physical topology及其相关学科的代写,服务范围广, 其中包括但不限于:
物理代写|拓扑物理代写Physical topology代考|Examples of manifolds
- $\mathbb{R}^{n}$, with atlas consisting of the single chart $\left(\mathbb{R}^{n}, i d\right)$.
- The unit circle $S^{1} \subset \mathbb{R}^{2}$, with atlas consisting of two charts giving the usual angular coordinate,
$$
\theta_{1}: S^{1}-{(-1,0)} \rightarrow(-\pi, \pi), \theta_{2}: S^{1}-{(1,0)} \rightarrow(0,2 \pi)
$$ - The unit sphere $S^{2} \subset \mathbb{R}^{3}$, with atlas consisting of two charts given by stereographic projections from the North Pole $N=(0,0,1)$ and South Pole $S=(0,0,-1)$ respectively,
$$
\phi_{1}: S^{2}-{N} \rightarrow \mathbb{R}^{2}, \phi_{2}: S^{2}-{P} \rightarrow \mathbb{R}^{2} .
$$
The same construction works for the $n$-sphere $S^{n} \subset \mathbb{R}^{n+1}$. - The two-torus $T^{2}=S^{1} \times S^{1} \subset \mathbb{R}^{4}$, with atlas consisting of 4 charts
$$
\begin{array}{lll}
U_{1} \times U_{1} & \rightarrow & (-\pi, \pi) \times(-\pi, \pi) \
U_{1} \times U_{2} & \rightarrow & (-\pi, \pi) \times(0,2 \pi) \
U_{2} \times U_{2} & \rightarrow & (0,2 \pi) \times(0,2 \pi) \
U_{2} \times U_{1} & \rightarrow & (0,2 \pi) \times(-\pi, \pi)
\end{array}
$$
giving the two angular coordinates on the torus, where
$$
U_{1}=S^{1}-{(-1,0)}, U_{2}=S^{1}-{(1,0)}
$$
Similarly the Cartesian product $M \times N$ of two manifolds $M, N$ is a manifold with charts $\phi \times \psi: U \times V \rightarrow \mathbb{R}^{m} \times \mathbb{R}^{n}$, where $(U, \phi),(V, \psi)$ are charts on $M, N$ respectively.
物理代写|拓扑物理代写Physical topology代考|Manifolds as configuration spaces of mechanical systems
The configuration spaces of many mechanical systems are often manifolds. We give some examples below, taken from Arnold’s book.
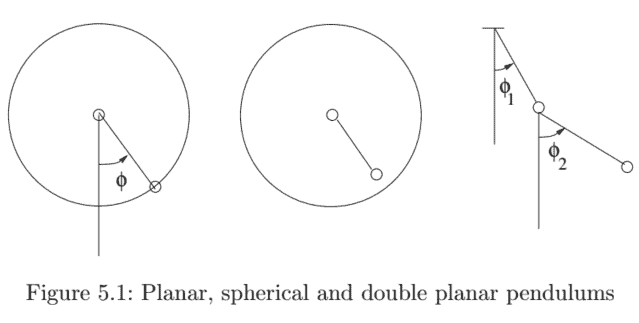
The configuration space of a planar pendulum is the circle $S^{1}$.
The configuration space of the “spherical” mathematical pendulum is the two-sphere $S^{2}$.
Example 3. The configuration space of a “planar double pendulum” is the two torus $T^{2}$.
The configuration space of a spherical double pendulum is the Cartesian product of two spheres $S^{2} \times S^{2}$.
The configuration space of a rigid line segment in the $\left(q_{1}, q_{2}\right)$-plane is the manifold $\mathbb{R}^{2} \times S^{1}$ with coordinates $q_{1}, q_{2}, q_{3}$.
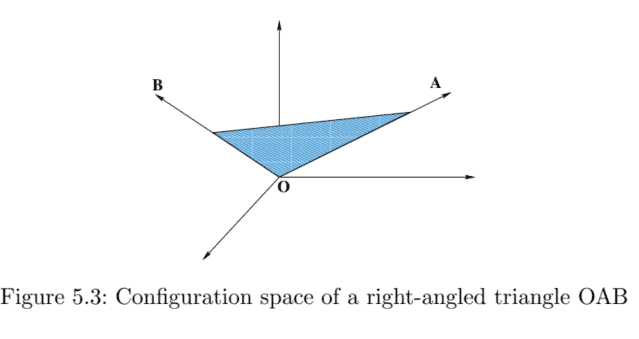
Example 6. A rigid right-angled triangle OAB moves around the vertex $O$ in $\mathbb{R}^{3}$. The position of the triangle is completely described by an orthogonal righthanded frame $\overrightarrow{e_{1}}=O A /|O A|, \overrightarrow{e_{2}}=O B /|O B|, \overrightarrow{e_{3}}=\overrightarrow{e_{1}} \times \overrightarrow{e_{2}}$, or equivalently by the $3 \times 3$ orthogonal matrix $\left[\overrightarrow{e_{1}}\left|\overrightarrow{e_{2}}\right| \overrightarrow{e_{3}}\right]$ with determinant $+1$. The configuration space of the triangle OAB is the group $S O(3)$ of such matrices, which is a 3 -manifold.
物理代写|拓扑物理代写PHYSICAL TOPOLOGY代考|Tangent spaces and derivatives
Just as smooth curves in $\mathbb{R}$ or surfaces in $\mathbb{R}^{3}$ have at each point a tangent line or tangent plane, to each point $x$ of a $k$-manifold $M$ embedded in $\mathbb{R}^{n}$ one can associate a $k$-dimensional subspace $T_{x} M$ of $\mathbb{R}^{n}$, called the tangent space to $M$ at $p$. The vector space $T_{x} M$ can be described as the set of velocities $\dot{\gamma}(0)$ of smooth curves $\gamma$ in $M$ passing through $x$ at time 0 .
For an abstract manifold without a given embedding into Euclidean space, such as those defined as quotient spaces, it is not immediately clear however how to define tangent spaces. While the Whitney Embedding Theorem ensures that any smooth manifold may be embedded into some Euclidean space, it is useful (and aesthetically satisfying) to have a definition of the tangent space $T_{p} M$ as an abstract vector space defined intrinsically independent of the choice of an embedding into Euclidean space. We give two definitions, one geometric and the other algebraic.
拓扑物理代写
物理代写|拓扑物理代写PHYSICAL TOPOLOGY代考|EXAMPLES OF MANIFOLDS
- Rn,图集由单个图表组成(Rn,一世d).
- 单位圆小号1⊂R2,地图集由两个图表组成,给出通常的角坐标,
θ1:小号1−(−1,0)→(−圆周率,圆周率),θ2:小号1−(1,0)→(0,2圆周率) - 单位球体小号2⊂R3, 地图集由北极的立体投影给出的两个图表组成ñ=(0,0,1)和南极小号=(0,0,−1)分别,
φ1:小号2−ñ→R2,φ2:小号2−磷→R2.
同样的建筑工程n-领域小号n⊂Rn+1. - 两环吨2=小号1×小号1⊂R4,图集由 4 个图表组成
在1×在1→(−圆周率,圆周率)×(−圆周率,圆周率) 在1×在2→(−圆周率,圆周率)×(0,2圆周率) 在2×在2→(0,2圆周率)×(0,2圆周率) 在2×在1→(0,2圆周率)×(−圆周率,圆周率)
给出环面上的两个角坐标,其中
在1=小号1−(−1,0),在2=小号1−(1,0)
同样的笛卡尔积米×ñ两个流形的米,ñ是带有图表的流形φ×ψ:在×在→R米×Rn, 在哪里(在,φ),(在,ψ)是图表米,ñ分别。
物理代写|拓扑物理代写PHYSICAL TOPOLOGY代考|MANIFOLDS AS CONFIGURATION SPACES OF MECHANICAL SYSTEMS
许多机械系统的配置空间通常是流形的。我们在下面给出了一些示例,这些示例取自 Arnold 的书中。
平面摆的构型空间是圆小号1.
“球面”数学摆的构型空间是二球面小号2.
示例 3. “平面双摆”的配置空间是两个圆环吨2.
球面双摆的构型空间是两个球面的笛卡尔积小号2×小号2.
刚性线段的配置空间(q1,q2)-plane 是流形R2×小号1带坐标q1,q2,q3.
示例 6. 刚性直角三角形 OAB 围绕顶点移动这在R3. 三角形的位置完全由一个正交的右手坐标系来描述和1→=这一种/|这一种|,和2→=这乙/|这乙|,和3→=和1→×和2→,或等效地由3×3正交矩阵[和1→|和2→|和3→]与行列式+1. 三角形OAB的配置空间是群小号这(3)这样的矩阵,这是一个 3 -流形。
物理代写|拓扑物理代写PHYSICAL TOPOLOGY代考|TANGENT SPACES AND DERIVATIVES
就像平滑的曲线一样R或表面R3在每个点都有一条切线或切平面,到每个点X一个ķ-歧管米嵌入Rn可以关联一个ķ维子空间吨X米的Rn,称为切空间米在p. 向量空间吨X米可以描述为速度的集合C˙(0)平滑曲线C在米路过X在时间 0 。
对于没有给定嵌入欧几里得空间的抽象流形,例如那些定义为商空间的抽象流形,如何定义切空间尚不清楚。虽然 Whitney 嵌入定理确保任何光滑流形都可以嵌入到某个欧几里得空间中,但它很有用一种nd一种和s吨H和吨一世C一种ll是s一种吨一世sF是一世nG定义切线空间吨p米作为本质上独立于嵌入到欧几里得空间中的选择而定义的抽象向量空间。我们给出了两种定义,一种是几何的,另一种是代数的。

物理代写|拓扑物理代写Physical topology代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。