如果你也在 怎样代写计算几何computational geometry这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。计算几何computational geometry是计算机科学的一个分支,致力于研究可以用几何学来表述的算法。一些纯粹的几何问题产生于对计算几何算法的研究,这类问题也被认为是计算几何的一部分。虽然现代计算几何是最近才发展起来的,但它是计算领域中最古老的领域之一,其历史可追溯到古代。
计算几何computational geometry是计算几何的核心,如果算法用于包含数千万或数亿个点的非常大的数据集,则具有很大的实际意义。对于这样的数据集,O(n2)和O(n log n)之间的区别可能是几天和几秒钟的计算量的区别。计算几何作为一门学科发展的主要动力是计算机图形学和计算机辅助设计与制造(CAD/CAM)的进展,但计算几何中的许多问题在本质上是经典的,可能来自数学可视化。
my-assignmentexpert™计算几何computational geometry作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的计算几何computational geometry作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此计算几何computational geometry作业代写的价格不固定。通常在经济学专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在计算几何computational geometry代写方面经验极为丰富,各种计算几何computational geometry相关的作业也就用不着 说。
我们提供的计算几何computational geometry及其相关学科的代写,服务范围广, 其中包括但不限于:
数学代考|计算几何代写computational geometry代考|Preliminaries
In this section, we consider random sampling queries for 3D halfspaces. But we first need to review some preliminaries.
Lemma 4. Let $P$ be a set of $n$ points in $\mathbb{R}^{3}$. Let $P=P_{1} \cup \cdots \cup P_{t}$ be a partition of $P$ into $t$ subsets. We can store $P$ in a data structure of size $O(n \log t)$ such that given a query halfspace $h$, we can find the smallest index $i$ such that $P_{i} \cap h \neq \emptyset$ in $O(\log n \log t)$ time.
Proof. See the full paper for the proof $[1]$.
The following folklore result is a special case of the above lemma.
- Corollary 5. Let $P$ be a set of $n$ points in $\mathbb{R}^{3}$ where each point $p \in P$ is assigned a real-valued weight $w(p)$. We can store $P$ in a data structure of size $O(n \log n)$ such that given a query halfspace $h$, we can find the point with maximum weight in $O\left(\log ^{2} n\right)$ time.
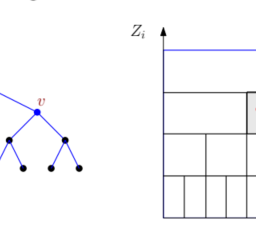
We also need the following preliminaries. Given a set $H$ of $n$ hyperplanes in $\mathbb{R}^{3}$, the level of a point $p$ is the number hyperplanes that pass below $p$. The $(\leq k)$-level of $H$ (resp. $k$-level of $H$ ) is the closure of the subset of $\mathbb{R}^{3}$ containing points with level at most $k$ (resp. exactly $k$ ). An approximate $k$-level of $H$ is a surface composed of triangles (possibly infinite triangles) that lies above $k$-level of $H$ but below (ck)-level of $H$ for a fixed constant $c$. For a point $q \in \mathbb{R}^{3}$, we define the conflict list of $q$ with respect to $H$ as the subset of hyperplanes in $H$ that pass below $q$ and we denote this with $\Delta(H, q)$. Similarly, for a triangle $\tau$ with vertices $v_{1}, v_{2}$, and $v_{3}$, we define $\Delta(H, \tau)=\Delta\left(H, v_{1}\right) \cup \Delta\left(H, v_{2}\right) \cup \Delta\left(H, v_{3}\right)$. One of the main tools that we will use is the existence of small approximate levels. This follows from the existence of shallow cuttings together with some geometric observations.
数学代考|计算几何代写COMPUTATIONAL GEOMETRY代考|A Solution with Expected Query Time
We now observe that we can use Lemma 3 to give a data structure for weighted halfspace range sampling queries in 3D. We first note that using Corollary 5 and by building a hierarchy of shallow cuttings, i.e., building approximate $k_{i}$-levels for $k_{i}=2^{i}, i=0, \cdots, \log n$, we can get a data structure with $O(n \log n)$ space that can answer queries in $O\left(\log ^{2} n+k\right)$ query time. Furthermore, as Lemma 2 shows, our problem is at least as hard as the halfspace range maximum problem which currently has no better solution than $O(n \log n)$ space and $O\left(\log ^{2} n\right)$ expected query time. Thus, it seems we cannot do better unless we can do better for range maximum queries, a problem that seems very difficult.
However, the reduction given by Lemma 2 is not completely satisfying since we need to create a set of weights that are exponentially distributed. As a result, it does not capture a more “natural” setting where the ratio between the largest and the smallest weight is bounded by a parameter $U$ that is polynomial in $n$. Our improved solution is the following which shows when $U=n^{O(1)}$ we can in fact reduce the space to linear.
数学代考|计算几何代写COMPUTATIONAL GEOMETRY代考|Worst-Case Time with Approximate Weights
All of the previous data structures sample items exactly proportional to their weight, but rely on rejection sampling. Hence, their query time is expected, and not worst case. With small probability these structures may repeatedly sample items which are not in $h$, and then need to reset and try again with no bound on the worst-case time. To achieve worst-case query time, we need some modifications. We allow for items to be sampled “almost” proportional to their weights, i.e., we introduce a notion of approximation. As we shall see in the next chapter, without some kind of approximation, our task is very likely impossible.
计算几何代写
数学代考|计算几何代写COMPUTATIONAL GEOMETRY代考|PRELIMINARIES
在本节中,我们考虑 3D 半空间的随机抽样查询。但我们首先需要复习一些预备知识。
引理 4. 让磷成为一组n点在R3. 让磷=磷1∪⋯∪磷吨成为一个分区磷进入吨子集。我们可以存储磷在大小的数据结构中这(n日志吨)这样给定一个查询半空间H,我们可以找到最小的索引一世这样磷一世∩H≠∅在这(日志n日志吨)时间。
证明。证明见全文[1].
下面的民间传说结果是上述引理的一个特例。
- 推论 5. 让磷成为一组n点在R3其中每个点p∈磷被分配一个实值权重在(p). 我们可以存储磷在大小的数据结构中这(n日志n)这样给定一个查询半空间H,我们可以找到权重最大的点这(日志2n)时间。
我们还需要以下准备工作。给定一个集合H的n超平面R3, 一个点的水平p是通过下方的超平面数p. 这(≤ķ)-水平H r和sp.$ķ$−l和在和l这F$H$是子集的闭包R3包含最多级别的点ķ r和sp.和X一种C吨l是$ķ$. 一个近似值ķ-水平H是由三角形组成的曲面p这ss一世bl是一世nF一世n一世吨和吨r一世一种nGl和s位于上方ķ-水平H但在下面Cķ-水平H对于固定常数C. 为了一点q∈R3,我们定义冲突列表q关于H作为超平面的子集H通过下面q我们用Δ(H,q). 同样,对于三角形τ带顶点在1,在2, 和在3,我们定义Δ(H,τ)=Δ(H,在1)∪Δ(H,在2)∪Δ(H,在3). 我们将使用的主要工具之一是存在小的近似水平。这是由于浅岩屑的存在以及一些几何观察。
数学代考|计算几何代写COMPUTATIONAL GEOMETRY代考|A SOLUTION WITH EXPECTED QUERY TIME
我们现在观察到,我们可以使用引理 3 为 3D 中的加权半空间范围采样查询提供数据结构。我们首先注意到,使用推论 5 并通过构建浅层切割的层次结构,即构建近似ķ一世- 级别ķ一世=2一世,一世=0,⋯,日志n,我们可以得到一个数据结构这(n日志n)可以回答查询的空间这(日志2n+ķ)查询时间。此外,正如引理 2 所示,我们的问题至少与半空间范围最大问题一样难,目前没有比这更好的解决方案这(n日志n)空间和这(日志2n)预期查询时间。因此,除非我们能在最大范围查询上做得更好,否则我们似乎无法做得更好,这似乎是一个非常困难的问题。
然而,引理 2 给出的减少并不完全令人满意,因为我们需要创建一组呈指数分布的权重。结果,它没有捕捉到更“自然”的设置,其中最大和最小权重之间的比率受参数限制在这是多项式n. 我们改进的解决方案如下,它显示了何时在=n这(1)我们实际上可以将空间减少到线性。
数学代考|计算几何代写COMPUTATIONAL GEOMETRY代考|WORST-CASE TIME WITH APPROXIMATE WEIGHTS
之前的所有数据结构都对与它们的权重成正比的项目进行抽样,但依赖于拒绝抽样。因此,他们的查询时间是预期的,而不是最坏的情况。这些结构可能会以很小的概率重复采样不在H,然后需要重置并重试,在最坏情况下没有限制。为了实现最坏情况下的查询时间,我们需要进行一些修改。我们允许对项目进行“几乎”与其权重成比例的采样,即我们引入了近似的概念。正如我们将在下一章中看到的,如果没有某种近似,我们的任务很可能是不可能的。

数学代考|计算几何代写computational geometry代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。