如果你也在 怎样代写机器学习Machine Learning KIT315这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。机器学习Machine Learning是一个致力于理解和建立 “学习 “方法的研究领域,也就是说,利用数据来提高某些任务的性能的方法。机器学习算法基于样本数据(称为训练数据)建立模型,以便在没有明确编程的情况下做出预测或决定。机器学习算法被广泛用于各种应用,如医学、电子邮件过滤、语音识别和计算机视觉,在这些应用中,开发传统算法来执行所需任务是困难的或不可行的。
机器学习Machine Learning程序可以在没有明确编程的情况下执行任务。它涉及到计算机从提供的数据中学习,从而执行某些任务。对于分配给计算机的简单任务,有可能通过编程算法告诉机器如何执行解决手头问题所需的所有步骤;就计算机而言,不需要学习。对于更高级的任务,由人类手动创建所需的算法可能是一个挑战。在实践中,帮助机器开发自己的算法,而不是让人类程序员指定每一个需要的步骤,可能会变得更加有效 。
机器学习Machine Learning代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。 最高质量的机器学习Machine Learning作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此机器学习Machine Learning作业代写的价格不固定。通常在专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
同学们在留学期间,都对各式各样的作业考试很是头疼,如果你无从下手,不如考虑my-assignmentexpert™!
my-assignmentexpert™提供最专业的一站式服务:Essay代写,Dissertation代写,Assignment代写,Paper代写,Proposal代写,Proposal代写,Literature Review代写,Online Course,Exam代考等等。my-assignmentexpert™专注为留学生提供Essay代写服务,拥有各个专业的博硕教师团队帮您代写,免费修改及辅导,保证成果完成的效率和质量。同时有多家检测平台帐号,包括Turnitin高级账户,检测论文不会留痕,写好后检测修改,放心可靠,经得起任何考验!
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
我们在计算机Quantum computer代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的计算机Quantum computer代写服务。我们的专家在机器学习Machine Learning代写方面经验极为丰富,各种机器学习Machine Learning相关的作业也就用不着 说。
计算机代写|机器学习代写Machine Learning代考|Application: Dagu Magician Robot
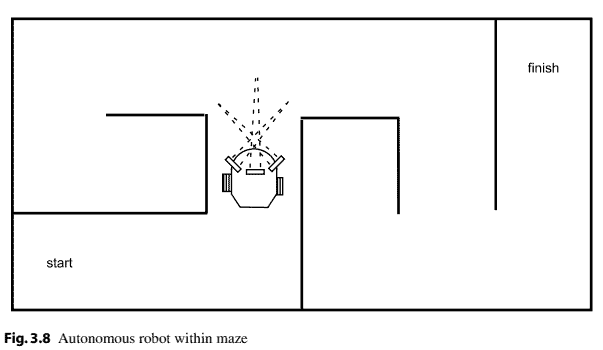
An autonomous, maze navigating robot is equipped with sensors to detect the presence of maze walls and navigate about the maze.2 The robot has no prior knowledge about the maze configuration. It uses the sensors and an onboard algorithm to determine the robot’s next move. The overall goal is to navigate from the starting point of the maze to the end point as quickly as possible without bumping into maze walls as shown in Fig. 3.8. Maze walls are usually painted white to provide a good, light reflective surface; whereas, the maze floor is painted matte black to minimize light reflections.It would be helpful to review the fundamentals of robot steering and motor control. Figure 3.9 illustrates the fundamental concepts. Robot steering is dependent upon the number of powered wheels and whether the wheels are equipped with unidirectional or bidirectional control. Additional robot steering configurations are possible. An H–bridge is typically required for bidirectional control of a DC motor. In this example we use unidirectional motor control. We equip the Dagu Magician Robot (DG007) with an Arduino Nano 33 BLE Sense microcontroller for maze navigation. Note: The Nano 33 is a 3.3 VDC microcontroller.
Care must be taken to ensure microcontroller inputs do not exceed 3.3 VDC and peripheral output device interfaces accommodate the 3.3 VDC output rated at a maximum of 10 mA DC current per input/output pin. Reference Fig. 3.10. The robot is controlled by two 6 VDC motors which independently drive a left and right wheel. A third non–powered ball provides tripod stability for the robot. We also equip the platform with three Sharp GP2Y0A21YK0F IR sensors as shown in Fig. 3.11. The sensors are available from SparkFun Electronics(www.sparkfun.com). We mount the sensors on a bracket constructed from thin aluminum.Dimensions for the bracket are provided in the figure. Alternatively, the IR sensors may be mounted to the robot platform using “L” brackets available from a local hardware store.
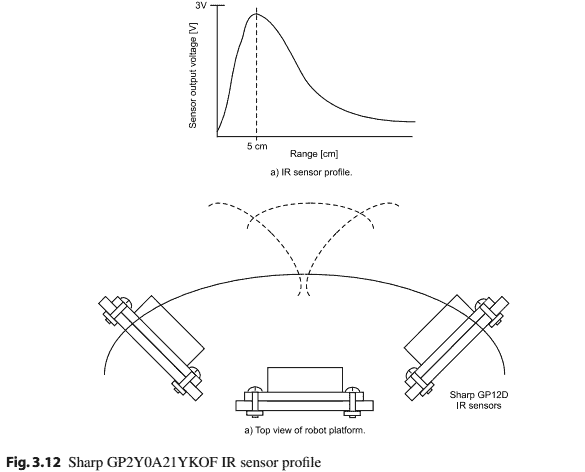
The characteristics of the sensor are provided in Fig. 3.12a. Note that the sensor provides the same output voltage for two different ranges. To remove this ambiguity, we mount the sensor bracket at the front of the robot facing forward such that the left sensor is monitoring maze wall presence on the right of the robot and vice versa. The ambiguity is resolved due to the sensor placement. That is, there is no way for the left or right sensor to be closer than5 cm right or left maze wall respectively. Hence there is only a single range value for a given sensor output voltage as shown in Fig. 3.12b.
计算机代写|机器学习代写Machine Learning代考|Requirements
The requirements for this project are simple, the robot must autonomously navigate through the maze without touching maze walls.
The circuit diagram for the robot is provided in Fig. 3.13. The three IR sensors (left, middle,and right) are mounted on the leading edge of the robot to detect maze walls. The output from the sensors is fed to three Arduino Nano 33 BLE Sense channels (ANALOG IN 0–2). The robot motors will be driven by pulse width modulated (PWM) channels (PWM: DIGITAL9 and PWM: DIGITAL 10).
The Arduino Nano 33 BLE Sense is interfaced to the motors via a Darlington NPN transistor (TIP120) with enough drive capability to handle the maximum current requirements of the motor (1.5 A stall current). The robot is powered by a 9 VDC power supply. Three 1N4001 diodes are placed in series with the motor to reduce the motor supply voltage to approximately 6.9 VDC. The 9 VDC supply is also fed to a 5 VDC voltage regulator to power the Arduino Nano 33 via the VI N pin (pin 15). To save on battery expense, it is recommended to use a 9 VDC, 2A rated inexpensive, wall–mount power supply to provide power to the onboard 5 VDC voltage regulator. A power umbilical of braided wire may be used to provide power to the robot while navigating about the maze. Structure chart: The structure chart for the robot project is provided in Fig. 3.14. UML activity diagrams: The UML activity diagram for the robot is provided in Fig. 3.15.
机器学习代写
计算机代写|机器学习代写MACHINE LEARNING代考|APPLICATION: DAGU MAGICIAN ROBOT
一个自主的迷宫导航机器人配备了传感器来检测迷宫墙壁的存在并在迷宫中导航。2 该机器人没有关于迷宫配置的先验知识。它使用传感器和机载算法来确定机器人的下一步行动。总体目标是尽可能快地从迷宫的起点导航到终点,而不撞到迷宫的墙壁,如图 3.8 所示。迷宫的墙壁通常涂成白色,以提供良好的反光表面;然而,迷宫地板涂成哑光黑色以最大程度地减少光反射。复习机器人转向和电机控制的基础知识会很有帮助。图 3.9 说明了基本概念。机器人转向取决于动力轮的数量以及轮子是否配备单向或双向控制。额外的机器人转向配置是可能的。直流电机的双向控制通常需要 H 桥。在本例中,我们使用单向电机控制。我们装备大鼓魔术师机器人DG007带有用于迷宫导航的 Arduino Nano 33 BLE Sense 微控制器。注意:Nano 33 是一个 3.3 VDC 微控制器。
必须注意确保微控制器输入不超过 3.3 VDC,并且外围输出设备接口可容纳 3.3 VDC 输出,每个输入/输出引脚的最大直流电流为 10 mA。参考图 3.10。机器人由两个独立驱动左右轮的 6 VDC 电机控制。第三个无动力球为机器人提供三脚架稳定性。我们还为平台配备了三个夏普 GP2Y0A21YK0F 红外传感器,如图 3.11 所示。这些传感器可从 SparkFun Electronics 获我们将传感器安装在由薄铝制成的支架上。图中提供了支架的尺寸。或者,可以使用本地五金店提供的“L”型支架将红外传感器安装到机器人平台上。
传感器的特性如图 3.12a 所示。请注意,传感器为两个不同的范围提供相同的输出电压。为了消除这种歧义,我们将传感器支架安装在机器人的前部,面向前方,以便左侧传感器监测机器人右侧的迷宫墙存在,反之亦然。由于传感器放置,歧义得到解决。也就是说,左传感器或右传感器不可能分别比右迷宫壁或左迷宫壁靠近 5 厘米。因此,对于给定的传感器输出电压,只有一个范围值,如图 3.12b 所示
计算机代写|机器学习代写MACHINE LEARNING代考|REQUIREMENTS
这个项目的要求很简单,机器人必须在不接触迷宫墙壁的情况下自主穿过迷宫。
机器人的电路图如图 3.13 所示。三个红外传感器安装在机器人的前缘以检测迷宫墙壁。传感器的输出被馈送到三个 Arduino Nano 33 BLE Sense 通道机器人电机将由脉宽调制驱动PWM频道PWMArduino Nano 33 BLE Sense 通过达林顿 NPN 晶体管连接到电机
具有足够的驱动能力来处理电机的最大电流要求
. 机器人由 9 VDC 电源供电。三个 1N4001 二极管与电机串联放置,以将电机电源电压降低至大约 6.9 VDC。9 VDC 电源也被馈送到 5 VDC 稳压器,通过 VI N 引脚为 Arduino Nano 33 供电
. 为节省电池费用,建议使用 9 VDC、额定 2A 的廉价壁挂式电源为板载 5 VDC 稳压器供电。编织线的电力脐带可用于在机器人在迷宫中航行时为机器人提供电力。结构图:机器人工程的结构图如图 3.14 所示。UML 活动图:机器人的 UML 活动图如图 3.15 所示。

计算机代写|机器学习代写Machine Learning代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。