如果你也在 怎样代写结构力学Structural Mechanics CE262这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。结构力学Structural Mechanics是应用力学中的一个研究领域,研究结构在机械载荷下的行为,如梁的弯曲、柱的屈曲、轴的扭转、薄壳的挠曲和桥梁的振动。有三种分析方法:能量法、柔性法或直接刚度法,后来发展为有限元法和塑性分析法。
结构力学Structural Mechanics是对结构内的变形、挠度和内力或应力(应力当量)的计算,用于设计或现有结构的性能评估。它是结构分析的一个子集。结构力学分析需要输入数据,如结构荷载、结构的几何表现和支撑条件以及材料的特性。输出量可能包括支撑反力、应力和位移。高级结构力学可能包括稳定性和非线性行为的影响。
结构力学Structural Mechanics代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。最高质量的结构力学Structural Mechanics作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此结构力学Structural Mechanics作业代写的价格不固定。通常在专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
同学们在留学期间,都对各式各样的作业考试很是头疼,如果你无从下手,不如考虑my-assignmentexpert™!
my-assignmentexpert™提供最专业的一站式服务:Essay代写,Dissertation代写,Assignment代写,Paper代写,Proposal代写,Proposal代写,Literature Review代写,Online Course,Exam代考等等。my-assignmentexpert™专注为留学生提供Essay代写服务,拥有各个专业的博硕教师团队帮您代写,免费修改及辅导,保证成果完成的效率和质量。同时有多家检测平台帐号,包括Turnitin高级账户,检测论文不会留痕,写好后检测修改,放心可靠,经得起任何考验!
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
我们在数学Mathematics代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在Matlab代写方面经验极为丰富,各种Matlab相关的作业也就用不着说。
物理代写|结构力学代写Structural Mechanics代考|The Deformation Map
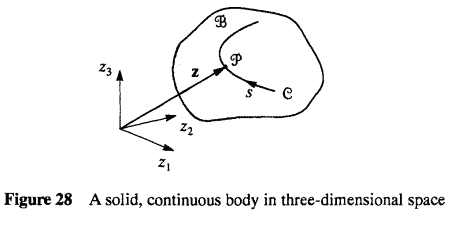
The description of the geometry of deformation must begin with a description of the body in question. For our purposes it is sufficient to imagine a continuous, solid body located in three-dimensional space. We must be able to completely characterize the geometry of the body in some configuration in order to make any headway in describing the geometry of deformation. We will call the known geometry the reference configuration. The reference configuration is often taken to be the unstressed and unstrained configuration of the body, although such a restriction is not necessary. Our primary assumption about the initial geometry is that in this configuration we know the position of every point in the body. A second, equally crucial, assumption is that the body is continuous (as opposed to, say, a collection of discrete particles). The assumption of continuity will allow us to use the tools of differential geometry.
Our prototypical body $\mathscr{B}$ is illustrated in Fig. 28. The initial geometry has two basic features: the domain, which is everything inside the body, and the boundary, which is the surface of the body. In the reference configuration $\mathscr{B}$ $\left{z_{1}, z_{2}, z_{3}\right}$ relative to the origin of the coordinate system. The vector pointing from the origin of coordinates to the point $\mathscr{P}$ is called the position vector $\mathbf{z}$.
物理代写|结构力学代写Structural Mechanics代考|The Stretch of a Curve
Our imaginary curve is a good starting point for the definition of strain in a three-dimensional body because we can examine the change in length of this line under the action of the deformation map. From elementary considerations we already know what strain means for the stretching of a line. The arbitrariness of the choice of our curve will allow us to generalize our concept of strain to three dimensions. Let us examine the change in length of the curve $\mathrm{C}$ between two points.
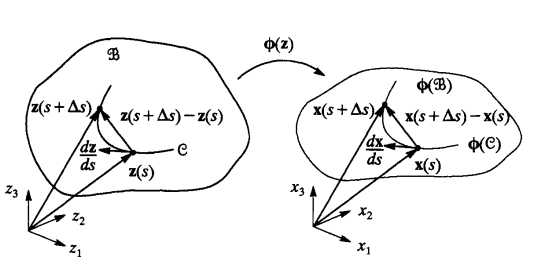
Consider two points on the curve $\mathcal{C}$, one described by the position vector $\mathbf{z}(s)$ and the other by the position vector $\mathbf{z}(s+\Delta s)$, as shown in Fig. 30. The vector connecting the first point to the second is $\Delta \mathbf{z} \equiv \mathbf{z}(s+\Delta s)-\mathbf{z}(s)$, and the length of this vector measures the straight-line distance between the two points. The two points are mapped to the positions $\mathbf{x}(s)$ and $\mathbf{x}(s+\Delta s)$, respectively, in the deformed configuration. The vector connecting the two points in the deformed configuration is $\Delta \mathbf{x} \equiv \mathbf{x}(s+\Delta s)-\mathbf{x}(s)$, and the length of this vector measures the straight-line distance between the two points. In the limit as $\Delta s \rightarrow 0$, the straight-line distance between two points and the distance measured along the arc become equal. Hence, in the limit, the lengths of the vectors $\Delta \mathbf{z}$ and $\Delta \mathbf{x}$ are appropriate measures of the lengths of the respective curves.
In the limit as $\Delta s \rightarrow 0$, the length of the vector $\mathbf{z}(s+\Delta s)-\mathbf{z}(s)$ approaches zero, but the ratio of the length of the vector to the length of the arc approaches unity. Taking the limit of this ratio as $\Delta s \rightarrow 0$, we obtain the expression for the tangent vector to the curve
$$
\lim _{\Delta s \rightarrow 0} \frac{\mathbf{z}(s+\Delta s)-\mathbf{z}(s)}{\Delta s}=\frac{d \mathbf{z}}{d s}
$$
Thus, the derivative of a position vector along a curve is always tangent to the curve. If it is normalized with respect to the measure of distance along the curve, then it is always a unit vector because as $\Delta s \rightarrow 0$, the secant line length approaches the arc length, i.e., $\Delta s \rightarrow|\mathbf{z}(s+\Delta s)-\mathbf{z}(s)|$.
结构力学代写
物理代写|结构力学代写STRUCTURAL MECHANICS代考|THE DEFORMATION MAP
变形几何的描述必须从对所讨论物体的描述开始。为了我们的目的,想象一个位于三维空间中的连续固体就足够了。为了在描述变形几何方面取得任何进展,我们 必须能够在某些配置中完全表征身体的几何形状。我们将已知几何称为参考配置。参考配置通常被认为是身体的无应力和无应变配置,尽管这种限制不是必需的。 我们对初始几何的主要假设是,在这种配置中,我们知道身体中每个点的位置。第二个同样重要的假设是物体是连续的
asopposedto, say, acollectionofdiscreteparticles.连续性假设将允许我们使用微分几何工具。 坐标系的原点。从坐标原点指向该点的向量 $\mathscr{P}$ 称为位置向量z.
物理代写|结构力学代写STRUCTURAL MECHANICS代考|THE STRETCH OF A CURVE
我们的假想曲线是定义三维物体应变的一个䀠好的起点,因为我们可以检亱在变形图的作用下这条线的长度变化。从基本的考虑,我们已经知道应变对于线的拉伸 意味着什么。曲线选择的任意性将使我们能够将应变概念推广到三个维度。让我们检育曲线长度的变化C两点之间。
考虑曲线上的两个点 $\mathcal{C}$,一个由位置向量描述 $\mathbf{z}(s)$ 另一个是位置向量 $\mathbf{z}(s+\Delta s)$ ,如图 30 所示。连接第一个点和第二个点的向量是 $\Delta \mathbf{z} \equiv \mathbf{z}(s+\Delta s)-\mathbf{z}(s)$ ,并且 这个向量的长度测量了两点之间的直线距离。这两个点映射到位置 $\mathbf{x}(s)$ 和 $\mathbf{x}(s+\Delta s)$ ,分别在变形配置中。连接变形配置中两点的向量是
$\Delta \mathrm{x} \equiv \mathbf{x}(s+\Delta s)-\mathbf{x}(s)$ ,并且这个向量的长度测量了两点之间的直线距离。在极限为 $\Delta s \rightarrow 0$ ,两点之间的直线距离与沿圆弧测量的距离相等。因此,在极限 情况下,向量的长度 $\Delta \mathrm{z}$ 和 $\Delta \mathrm{x}$ 是相应曲线长度的适当度量。
在极限为 $\Delta s \rightarrow 0$, 向量的长度 $\mathrm{z}(s+\Delta s)-\mathrm{z}(s)$ 接近零,但向量的长度与弧的长度之比接近 1 。取这个比率的极限为 $\Delta s \rightarrow 0$ ,我们得到曲线的切向量的表达式
$$
\lim _{\Delta s \rightarrow 0} \frac{\mathbf{z}(s+\Delta s)-\mathbf{z}(s)}{\Delta s}=\frac{d \mathbf{z}}{d s}
$$
因此,位置向量沿曲线的导数总是与曲线相切。如果它相对于沿曲线的距离度量进行归一化,则它始終是单位向量,因为 $\Delta s \rightarrow 0$ ,割线长度接近弧长,即, $\Delta s \rightarrow|\mathbf{z}(s+\Delta s)-\mathbf{z}(s)|$

物理代写|结构力学代写Structural Mechanics代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。