如果你也在 怎样代写振动力学Vibration Mechanics ENG211这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。振动力学Vibration Mechanics是一种机械现象,即围绕一个平衡点发生振荡。这个词来自拉丁语的 vibrationem(”摇晃,挥舞”)。振荡可以是周期性的,如钟摆的运动,也可以是随机的,如轮胎在碎石路上的运动。
振动力学Vibration Mechanics可以是理想的:例如,音叉、木管乐器或口琴中的簧片、移动电话或扬声器的锥体的运动。然而,在许多情况下,振动是不可取的,会浪费能量并产生不需要的声音。例如,发动机、电动马达或任何机械装置在运行中的振动运动通常是不受欢迎的。这种振动可能是由旋转部件的不平衡、不均匀的摩擦或齿轮齿的啮合引起的。精心的设计通常会将不必要的振动降到最低。对声音和振动的研究是密切相关的。声音,或压力波,是由振动结构(如声带)产生的;这些压力波也可以引起结构(如耳鼓)的振动。因此,减少噪声的尝试往往与振动问题有关。
振动力学Vibration Mechanics代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。最高质量的振动力学Vibration Mechanics作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此振动力学Vibration Mechanics作业代写的价格不固定。通常在专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
同学们在留学期间,都对各式各样的作业考试很是头疼,如果你无从下手,不如考虑my-assignmentexpert™!
my-assignmentexpert™提供最专业的一站式服务:Essay代写,Dissertation代写,Assignment代写,Paper代写,Proposal代写,Proposal代写,Literature Review代写,Online Course,Exam代考等等。my-assignmentexpert™专注为留学生提供Essay代写服务,拥有各个专业的博硕教师团队帮您代写,免费修改及辅导,保证成果完成的效率和质量。同时有多家检测平台帐号,包括Turnitin高级账户,检测论文不会留痕,写好后检测修改,放心可靠,经得起任何考验!
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
我们在物理Physical代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的物理Physical代写服务。我们的专家在振动力学Vibration Mechanics代写方面经验极为丰富,各种振动力学Vibration Mechanics相关的作业也就用不着说。
物理代写|振动力学代写Vibration Mechanics代考|Beautiful Features of Vibration Mechanics
In the theoretical frame of vibration mechanics, unity exists between different parts of the frame, between parts and the whole frame as well, such that the frame is a unified and beautiful entirety. For instance, the dynamic equations of a discrete system are a set of ordinary differential equations of the second-order of time derivative, while the dynamic equation of a continuous system is a partial differential equation of the second-order of time derivative. If a discrete system is divided into several sub-systems, the dynamic equations of each sub-system keep as a set of ordinary differential equations similar to those of the entire system. Thus, the theory of vibration mechanics enjoys a quite unified frame. Once a breakthrough is made, it will bring the development of the whole field.
The elementary textbooks mainly dealt with the linear vibration systems in a discrete form. That is, the linear dynamic system with an input vector $\boldsymbol{f}(t)$ and an output vector $\boldsymbol{u}(t)$. The linear system has two fundamental properties, namely, homogeneity and additivity. Mathematically speaking, the system can be defined as a linear mapping $L: f(t) \mapsto u(t)$ from an input vector to an output vector, while these two properties can be expressed as
$$
\left{\begin{array}{l}
L[\alpha \boldsymbol{f}(t)]=\alpha L[\boldsymbol{f}(t)]=\alpha \boldsymbol{u}(t), \quad \alpha \in(-\infty,+\infty) \
L\left[\boldsymbol{f}_1(t)+\boldsymbol{f}_2(t)\right]=L\left[\boldsymbol{f}_1(t)\right]+L\left[\boldsymbol{f}_2(t)\right]=\boldsymbol{u}_1(t)+\boldsymbol{u}_2(t)
\end{array}\right.
$$
In the community of mechanics, the two properties are named the principle of superposition. That is, when the multiple inputs, including initial disturbance and multiple external loads, are applied to a linear system, the entire output, namely, the dynamic response, is the superposition of all outputs, each of which is caused by an individual input. The theory of linear vibrations based on the principle of superposition exhibits the beautiful unity.
To be more specific, consider a linear $n$-DoF system, which yields the following initial value problem governed by a set of linear ordinary differential equations
$$
\left{\begin{array}{l}
M \ddot{u}(t)+\boldsymbol{C} \dot{u}(t)+\boldsymbol{K} \boldsymbol{u}(t)=\boldsymbol{f}(t) \
\boldsymbol{u}(0)=u_0, \quad \dot{\boldsymbol{u}}(0)=\dot{u}_0
\end{array}\right.
$$
where $f: t \mapsto \mathbb{R}^n$ is the external force vector, $u: t \mapsto \mathbb{R}^n$ is the system displacement vector, $\boldsymbol{u}_0 \in \mathbb{R}^n$ is the initial displacement vector, $\dot{u}_0 \in \mathbb{R}^n$ is the initial velocity vector, $\mathbb{R}^n$ is a real vector space of $n$ dimensions and named the configuration space of the system. In addition, $M \in \mathbb{R}^{n \times n}$ is the positive definite mass matrix, $\boldsymbol{K} \in \mathbb{R}^{n \times n}$ is the positive or semi positive definite stiffness matrix, $C \in \mathbb{R}^{n \times n}$ is the symmetric damping matrix, and $\mathbb{R}^{n \times n}$ is the space of real square matrix of order $n$.
物理代写|振动力学代写Vibration Mechanics代考|Simplicity
The theoretical frame of vibration mechanics has a clear outlines, the minimal concepts of component elements, and a very simple structure. For instance, the theoretical frame of linear vibrations is based on the principle of superposition and gives rise to a few simple, but significant theorems and formulae. Among them, Eq. (2.2.3) is a good example.
In addition, the vibration problems often have the possibility of decomposition. As stated in Sect. 2.2.1, for instance, the response of a linear system includes two parts. One is the system response subject to the initial disturbance, and the other is the response subject to the external excitation.
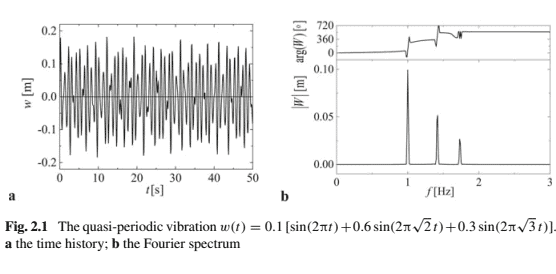
The other example is the complicated time history of quasi-periodic vibration $w(t)$ shown in Fig. 2.1a, which can be decomposed, via Fourier transform, into three harmonic vibrations in frequency domain. Figure $2.1 \mathrm{~b}$ presents the simple picture of the amplitude-frequency relation $|W(f)|$.
The main thread in the study of vibration problems is to decompose a complicated problem into a number of simpler ones. The main thread has led to a number of well known methods, such as the modal analysis, the Duhamel integral in time domain, the spectral analysis in frequency domain, and the dynamic sub-structuring in space domain. Now, we turn to the modal analysis of a linear MDoF system to explain the main thread as follows.
Let $u_r(t)=\varphi_r \sin \left(\omega_r t+\theta_r\right), \quad r=1,2, \ldots, n$ be the natural vibrations of the linear system governed by Eq. (2.2.2). They satisfy the following solutions of an eigenvalue problem
$$
\left(\boldsymbol{K}-\omega_r^2 \boldsymbol{M}\right) \boldsymbol{\varphi}_r=\mathbf{0}, \quad r=1,2, \ldots, n
$$
If all the natural frequencies are distinct, namely, $0 \leq \omega_1<\omega_2<\cdots<\omega_n$, the mode shape vectors $\varphi_r \in \mathbb{R}^n, \quad r=1,2, \ldots, n$ satisfy the orthogonal relations, or called the orthogonality, as follows
$$
\boldsymbol{\varphi}_r^{\mathrm{T}} \boldsymbol{M} \boldsymbol{\varphi}_s=\left{\begin{array}{l}
M_r, r=s \
0, \quad r \neq s ;
\end{array} \quad \boldsymbol{\varphi}_r^{\mathrm{T}} \boldsymbol{K} \boldsymbol{\varphi}_s=\left{\begin{array}{l}
K_r, r=s \
0, r \neq s ;
\end{array} \quad r, s=1,2, \ldots, n\right.\right.
$$
where $M_r>0$ is the $r$-th modal mass coefficient, and $K_r=M_r \omega_r^2 \geq 0$ is the $r$-th modal stiffness coefficient.
振动力学代写
物理代写|振动力学代写振动力学代考|振动力学的美丽特征
在振动力学的理论框架中,框架的各个部分之间存在统一性,各个部分与整个框架之间也存在统一性,因此框架是一个统一而美丽的整体。例如,离散系统的动力学方程是一组二阶时间导数的常微分方程,而连续系统的动力学方程是二阶时间导数的偏微分方程。如果一个离散系统被划分为几个子系统,每个子系统的动力学方程保持为一组与整个系统的动力学方程相似的常微分方程。因此,振动力学理论享有一个相当统一的框架。一旦取得了突破,就会带动整个领域的发展
初级教科书主要处理离散形式的线性振动系统。即具有输入向量$\boldsymbol{f}(t)$和输出向量$\boldsymbol{u}(t)$的线性动态系统。线性系统具有两个基本性质,即同质性和可加性。从数学上讲,该系统可以定义为$L: f(t) \mapsto u(t)$从输入向量到输出向量的线性映射,而这两个性质可以表示为
$$
\left{\begin{array}{l}
L[\alpha \boldsymbol{f}(t)]=\alpha L[\boldsymbol{f}(t)]=\alpha \boldsymbol{u}(t), \quad \alpha \in(-\infty,+\infty) \
L\left[\boldsymbol{f}_1(t)+\boldsymbol{f}_2(t)\right]=L\left[\boldsymbol{f}_1(t)\right]+L\left[\boldsymbol{f}_2(t)\right]=\boldsymbol{u}_1(t)+\boldsymbol{u}_2(t)
\end{array}\right.
$$
在力学学界,这两个性质被命名为叠加原理。即当对线性系统施加多个输入,包括初始扰动和多个外部负载时,整个输出即动态响应是所有输出的叠加,每一个输出都是由一个单独的输入引起的。基于叠加原理的线性振动理论表现出美丽的统一性
更具体地说,考虑一个线性$n$ -DoF系统,它产生以下由一组线性常微分方程
$$
\left{\begin{array}{l}
M \ddot{u}(t)+\boldsymbol{C} \dot{u}(t)+\boldsymbol{K} \boldsymbol{u}(t)=\boldsymbol{f}(t) \
\boldsymbol{u}(0)=u_0, \quad \dot{\boldsymbol{u}}(0)=\dot{u}_0
\end{array}\right.
$$
控制的初值问题,其中$f: t \mapsto \mathbb{R}^n$是外力向量,$u: t \mapsto \mathbb{R}^n$是系统位移向量,$\boldsymbol{u}_0 \in \mathbb{R}^n$是初始位移向量,$\dot{u}_0 \in \mathbb{R}^n$是初始速度向量,$\mathbb{R}^n$是$n$维的实向量空间,称为系统的构形空间。此外,$M \in \mathbb{R}^{n \times n}$为正定质量矩阵,$\boldsymbol{K} \in \mathbb{R}^{n \times n}$为正定或半正定刚度矩阵,$C \in \mathbb{R}^{n \times n}$为对称阻尼矩阵,$\mathbb{R}^{n \times n}$为$n$阶实方阵的空间。
物理代写|振动力学代写振动力学代考|简单
振动力学的理论框架有一个清晰的轮廓,最小的组成元素的概念,和一个非常简单的结构。例如,线性振动的理论框架是建立在叠加原理的基础上的,并提出了一些简单但有意义的定理和公式。其中,Eq.(2.2.3)就是一个很好的例子
此外,振动问题往往有分解的可能。例如,如2.2.1节所述,线性系统的响应包括两部分。一个是受初始扰动影响的系统响应,另一个是受外部激励影响的系统响应。
另一个例子是图2.1a所示的准周期振动$w(t)$的复杂时程,它可以通过傅里叶变换在频域分解为三个谐波振动。图$2.1 \mathrm{~b}$给出了幅频关系$|W(f)|$的简单图。
振动问题研究的主线是把一个复杂的问题分解成若干个较简单的问题。这一主线引出了许多著名的方法,如模态分析、时域Duhamel积分、频域谱分析和空间域动态子结构。现在,我们转向一个线性多自由度系统的模态分析来解释主线程如下
设$u_r(t)=\varphi_r \sin \left(\omega_r t+\theta_r\right), \quad r=1,2, \ldots, n$为由式(2.2.2)控制的线性系统的自然振动。它们满足特征值问题的以下解
$$
\left(\boldsymbol{K}-\omega_r^2 \boldsymbol{M}\right) \boldsymbol{\varphi}_r=\mathbf{0}, \quad r=1,2, \ldots, n
$$
如果所有的固有频率都是不同的,即$0 \leq \omega_1<\omega_2<\cdots<\omega_n$,模态振型向量$\varphi_r \in \mathbb{R}^n, \quad r=1,2, \ldots, n$满足正交关系,或称为正交性,如下
$$
\boldsymbol{\varphi}_r^{\mathrm{T}} \boldsymbol{M} \boldsymbol{\varphi}_s=\left{\begin{array}{l}
M_r, r=s \
0, \quad r \neq s ;
\end{array} \quad \boldsymbol{\varphi}_r^{\mathrm{T}} \boldsymbol{K} \boldsymbol{\varphi}_s=\left{\begin{array}{l}
K_r, r=s \
0, r \neq s ;
\end{array} \quad r, s=1,2, \ldots, n\right.\right.
$$
其中$M_r>0$是$r$第th模态质量系数,$K_r=M_r \omega_r^2 \geq 0$是$r$第th模态刚度系数

物理代写|振动力学代写Vibration Mechanics代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
微观经济学代写
微观经济学是主流经济学的一个分支,研究个人和企业在做出有关稀缺资源分配的决策时的行为以及这些个人和企业之间的相互作用。my-assignmentexpert™ 为您的留学生涯保驾护航 在数学Mathematics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的数学Mathematics代写服务。我们的专家在图论代写Graph Theory代写方面经验极为丰富,各种图论代写Graph Theory相关的作业也就用不着 说。
线性代数代写
线性代数是数学的一个分支,涉及线性方程,如:线性图,如:以及它们在向量空间和通过矩阵的表示。线性代数是几乎所有数学领域的核心。
博弈论代写
现代博弈论始于约翰-冯-诺伊曼(John von Neumann)提出的两人零和博弈中的混合策略均衡的观点及其证明。冯-诺依曼的原始证明使用了关于连续映射到紧凑凸集的布劳威尔定点定理,这成为博弈论和数学经济学的标准方法。在他的论文之后,1944年,他与奥斯卡-莫根斯特恩(Oskar Morgenstern)共同撰写了《游戏和经济行为理论》一书,该书考虑了几个参与者的合作游戏。这本书的第二版提供了预期效用的公理理论,使数理统计学家和经济学家能够处理不确定性下的决策。
微积分代写
微积分,最初被称为无穷小微积分或 “无穷小的微积分”,是对连续变化的数学研究,就像几何学是对形状的研究,而代数是对算术运算的概括研究一样。
它有两个主要分支,微分和积分;微分涉及瞬时变化率和曲线的斜率,而积分涉及数量的累积,以及曲线下或曲线之间的面积。这两个分支通过微积分的基本定理相互联系,它们利用了无限序列和无限级数收敛到一个明确定义的极限的基本概念 。
计量经济学代写
什么是计量经济学?
计量经济学是统计学和数学模型的定量应用,使用数据来发展理论或测试经济学中的现有假设,并根据历史数据预测未来趋势。它对现实世界的数据进行统计试验,然后将结果与被测试的理论进行比较和对比。
根据你是对测试现有理论感兴趣,还是对利用现有数据在这些观察的基础上提出新的假设感兴趣,计量经济学可以细分为两大类:理论和应用。那些经常从事这种实践的人通常被称为计量经济学家。
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。