如果你也在 怎样代写量子计算Quantum computing这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。量子计算Quantum computing是物理和计算机的交叉学科,构造新型计算模式。传统计算机和量子计算机之间的根本区别在于,量子计算机中的程序本质上是概率性质的,而传统计算机通常是确定性的。 在量子算法中,每个可能的结果都有关联的概率振幅。 测量后,其中某个可能状态以特定概率获得。 该情况与传统计算相反,在传统计算中,一个位只能是确定的 0 或 1。
量子计算是一种遵循量子力学规律调控量子信息单元进行计算的新型计算模式。 对照于传统的通用计算机,其理论模型是通用图灵机;通用的量子计算机,其理论模型是用量子力学规律重新诠释的通用图灵机。
量子计算Quantum computation领域盛行的量子计算模型是以量子逻辑门的网络来描述计算的。这个模型是布尔电路的一个复杂的线性代数的概括。
一个由$n$位信息组成的存储器有$2^{n}$的可能状态。因此,代表所有存储器状态的向量有2^{n}$项(每个状态一个)。这个向量被看作是一个概率向量,代表内存在某个特定状态下被发现的事实。
在经典观点中,一个条目的值为1(即处于这种状态的概率为100美元),所有其他条目都是0。
在量子力学中,概率向量可以被概括为密度算子。量子状态向量形式主义通常首先被介绍,因为它在概念上更简单,而且它可以代替密度矩阵形式主义用于纯状态,在那里整个量子系统是已知的。
我们首先考虑一个只由一个比特组成的简单存储器。这个存储器可以在两种状态中找到一个:零状态或一状态。我们可以用狄拉克符号来表示这个存储器的状态,因此
$|0\rangle:=\left(\begin{array}{l}1 \ 0\end{array}\right)$
$|1\rangle:=\left(\begin{array}{l}0 \ 1\end{array}\right)$
然后,在两个经典状态$|0\rangle$和$|1\rangle$的任何量子叠加中可以找到一个量子存储器。
$|\psi\rangle:=\alpha|0\rangle+\beta|1\rangle=\left(\begin{array}{c}\alpha \ \beta\end{array}\right) ; \quad|\alpha|^{2}+|\beta|^{2}=1$
my-assignmentexpert™ 量子计算Quantum computing作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的量子计算Quantum computing作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此量子计算Quantum computing作业代写的价格不固定。通常在经济学专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在统计Statistics作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的统计Statistics代写服务。我们的专家在量子计算Quantum computing代写方面经验极为丰富,各种量子计算Quantum computing相关的作业也就用不着 说。
我们提供的量子计算Quantum computing及其相关学科的代写,服务范围广, 其中包括但不限于:
- 密码学 Cryptography
- 搜索算法 Search problems
- 量子系统的仿真 Simulation of quantum systems
- 机器学习 Machine learning
- 计算生物学 Computational biology
- Computer-aided drug design and generative chemistry
物理代写| 量子计算作业代写Quantum computing代考|QMOS FOR OBJECT-OBJECT INTERSECTION IDENTIFICATION
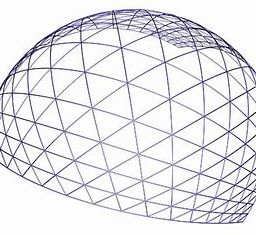
When simulating the motion of objects in a multi-object simulation or Virtual Reality (VR) system, it is necessary to identify the interaction of any pair of objects so that their respective states can be updated, e.g., to reflect the kinematic changes resulting from a collision. Collision detection introduces two computational challenges. The first involves the determination of whether two given
objects are interacting as indicated by an intersection of their surfaces. This can be computationally expensive for objects whose surfaces are non-convex. The second challenge is to identify which pairs have interacted out of a set of $\mathrm{N}$ moving objects. This is often the most computationally expensive part of a simulation or VR system because $O\left(N^{2}\right)$ time is required to check every pair, and the most commonly used algorithms for reducing this complexity tend to be data-dependent with scaling between $O(N \log (N))$ and $O\left(N^{2}\right)$. Grid-based algorithms (possibly using hash indexing) can make time/space tradeoffs in which storage is proportional the volume of the search space or the query time is proportional to the volume of the objects. However, none of these approaches appear to be practical for very large problems.
The most basic capability necessary for collision detection is to determine whether two given objects intersect, e.g., after their states have been motion-updated during a timestep. If the objects are convex, then intersections can be performed very efficiently. However, if they are very complex dynamic objects, e.g., streamers blowing in the wind, then determining intersection can be computationally expensive.
A standard mechanism for reducing the computational overhead of intersection detection is to apply coarse gating criteria that can efficiently identify pairs that do not intersect. One such mechanism is the use of bounding volumes, such as, spheres, coordinate-aligned boxes, and convex hulls. If the bounding volumes for two given objects do not intersect, then the objects cannot possibly intersect, so there is no need to perform more complex calculations involving the actual objects themselves.
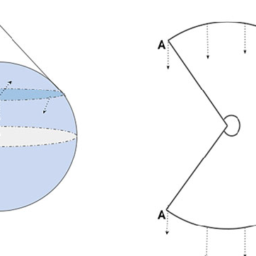
One approach for gating is to compute the 2D convex hulls of each 3D object obtained by projecting (implicitly) its surface points onto each coordinate plane. With these hulls it is possible to determine that two given objects do not intersect simply by showing that their $2 \mathrm{D}$ convex hulls do not intersect in one of the coordinate planes. No projection operation needs to be explicitly performed because the projection of a point onto one of a coordinate plane is found directly from two of the point’s three coordinates, so the computation of the convex hulls represent the main computational expense.
There are many efficient classical algorithms for computing $2 \mathrm{D}$ convex hulls, but the most efficient of these algorithms requires $\Omega(N \log (h))$ time for $N$ objects with $h$ points forming the convex hull. The relevant question is whether a better $\mathrm{QC}$ algorithm exists. One approach for finding such an algorithm is to examine each of the known $\mathrm{CC}$ algorithms to determine whether Amplitude Amplification Algorithms can be productively applied. It turns out that one classical algorithm, the Jarvis March [41], can exploit a quantum solution.
物理代写| 量子计算作业代写QUANTUM COMPUTING代考|QMOS FOR BATCH INTERSECTION IDENTIFICATION
In the previous section we were concerned with the efficient determination of whether two objects, comprised of $O(N)$ surface points, intersect. In this section we are concerned with the identification of all pairs of intersecting objects in a dataset of $N$ objects. This type of operation is necessary to identify all interactions or collisions in multi-object simulations.
The identification of all intersections can be accomplished in an online setting by applying the QMOS algorithm sequentially for each of the $N$ objects with an oracle that identifies all objects which intersect the object. The resulting complexity is:
$$
N * O\left(\left(k_{u_{\mathrm{n}}} N\right)^{1 / 2}\right)=O\left(N^{1.5} k_{\mathrm{mg}}^{1 / 2}\right)
$$
A more direct batch algorithm for finding the $m$ total intersections from a set of $N$ objects is possible by further exploiting the power of $\mathrm{QC}$ by doubling the size of the quantum register and constructing the Cartesian product of the $N$ objects. In QC, this can be done in $O(1)$ time. QMOS can then be applied to the $N^{2}$ pairs to extract the $m$ intersecting pairs in $O\left(\left(N^{2} m\right)^{1 / 2}\right)=O\left(N m^{1 / 2}\right)$ time. For $m=N * k_{\text {ng }}$, this complexity is the same as the earlier result obtained by performing $N$ sequential intersection queries; however, the overhead of iteration in the latter approach is completely avoided, i.e., it may be speculated that the batch identification of $m$ intersections should prove to be significantly faster in practice.
To conclude, we have derived a general quantum algorithm for identifying all of the $m$ intersecting pairs of objects in a dataset of size $N$. This algorithm has complexity $O(N * \sqrt{m})$, which matches the classical worst-case optimal algorithm when $m$ is $O\left(N^{2}\right)$ and improves over the best possible classical algorithm in all other cases. In particular, when $m$ is $O(N)$, which is the case in many practical applications in which each object intersects only a constant number of other objects, the complexity of the new quantum search algorithm is $O\left(N^{1.5}\right)$. Although classical algorithms can achieve subquadratic complexity for special classes of objects, e.g., orthogonal boxes or convex polyhedra, our quantum algorithm achieves its complexity for any class of objects.
物理代考
物理代写| 量子计算作业代写QUANTUM COMPUTING代考|QMOS FOR OBJECT-OBJECT INTERSECTION IDENTIFICATION
在多对象模拟或虚拟现实中模拟对象的运动时五R在系统中,有必要识别任何一对对象的交互,以便更新它们各自的状态,例如,反映碰撞导致的运动学变化。碰撞检测引入了两个计算挑战。第一个涉及确定两个给定的
对象正在交互,如其表面的交点所示。对于表面为非凸面的对象,这在计算上可能会很昂贵。第二个挑战是确定哪些对已经从一组交互ñ移动物体。这通常是模拟或 VR 系统中计算成本最高的部分,因为○(ñ2)检查每一对都需要时间,并且用于降低这种复杂性的最常用算法往往依赖于数据,并且在○(ñ日志(ñ))和○(ñ2). 基于网格的算法p○ss一世b一世和你s一世nGH一种sH一世nd和X一世nG可以进行时间/空间权衡,其中存储与搜索空间的体积成正比,或者查询时间与对象的体积成正比。然而,这些方法似乎都不适用于非常大的问题。
碰撞检测所需的最基本能力是确定两个给定对象是否相交,例如,在它们的状态在一个时间步长期间已被运动更新之后。如果对象是凸的,则可以非常有效地执行相交。然而,如果它们是非常复杂的动态对象,例如在风中飘扬的拖缆,那么确定交叉点的计算成本可能会很高。
减少交叉检测计算开销的标准机制是应用粗选通标准,该标准可以有效地识别不相交的对。一种这样的机制是使用包围体,例如球体、坐标对齐框和凸包。如果两个给定对象的包围体不相交,则对象不可能相交,因此无需执行涉及实际对象本身的更复杂的计算。
门控的一种方法是计算通过投影获得的每个 3D 对象的 2D 凸包一世米p一世一世C一世吨一世和它的表面指向每个坐标平面。有了这些外壳,就可以确定两个给定的对象不相交,只需显示它们的2D凸包不在其中一个坐标平面中相交。不需要显式执行投影操作,因为直接从点的三个坐标中的两个找到一个点到坐标平面之一的投影,因此凸包的计算代表了主要的计算开销。
有许多有效的经典计算算法2D凸包,但这些算法中最有效的需要Ω(ñ日志(H))的时间ñ对象与H形成凸包的点41. 相关的问题是是否更好问C算法存在。找到这种算法的一种方法是检查每个已知的CC确定幅度放大算法是否可以有效应用的算法。事实证明,一种经典算法,Jarvis March41,可以利用量子解决方案。
物理代写| 量子计算作业代写QUANTUM COMPUTING代考|QMOS FOR BATCH INTERSECTION IDENTIFICATION
在上一节中,我们关注的是如何有效地确定两个对象是否由○(ñ)表面点,相交。在本节中,我们关注的是识别数据集中所有相交对象对ñ对象。这种类型的操作对于识别多对象模拟中的所有交互或碰撞是必要的。
所有交叉点的识别可以在在线设置中通过对每个交叉点依次应用 QMOS 算法来完成。ñ具有识别与对象相交的所有对象的预言的对象。由此产生的复杂性是:
ñ∗○((到你nñ)1/2)=○(ñ1.5到米G1/2)
一种更直接的批处理算法,用于查找米一组的总交点ñ对象可以通过进一步利用的力量问C通过将量子寄存器的大小加倍并构造ñ对象。在 QC 中,这可以在○(1)时间。QMOS 然后可以应用于ñ2对提取米相交对○((ñ2米)1/2)=○(ñ米1/2)时间。为了米=ñ∗到吴 ,这个复杂度与之前通过执行获得的结果相同ñ顺序交叉查询;但是,完全避免了后一种方法中的迭代开销,即可以推测米在实践中,交叉口应该会明显更快。
总而言之,我们推导出了一个通用的量子算法来识别所有的米在大小的数据集中相交对象对ñ. 该算法具有复杂性○(ñ∗米),它匹配经典的最坏情况最优算法,当米是○(ñ2)并在所有其他情况下改进了最好的经典算法。特别是,当米是○(ñ),在许多实际应用中,每个对象只与恒定数量的其他对象相交,新的量子搜索算法的复杂度为○(ñ1.5). 虽然经典算法可以实现特殊类别对象的次二次复杂度,例如正交框或凸多面体,但我们的量子算法可以实现任何类别对象的复杂度。
物理代写| 量子计算作业代写Quantum computing代考|UNDERSTANDING QUANTUM ALGORITHMICS 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
电磁学代考
物理代考服务:
物理Physics考试代考、留学生物理online exam代考、电磁学代考、热力学代考、相对论代考、电动力学代考、电磁学代考、分析力学代考、澳洲物理代考、北美物理考试代考、美国留学生物理final exam代考、加拿大物理midterm代考、澳洲物理online exam代考、英国物理online quiz代考等。
光学代考
光学(Optics),是物理学的分支,主要是研究光的现象、性质与应用,包括光与物质之间的相互作用、光学仪器的制作。光学通常研究红外线、紫外线及可见光的物理行为。因为光是电磁波,其它形式的电磁辐射,例如X射线、微波、电磁辐射及无线电波等等也具有类似光的特性。
大多数常见的光学现象都可以用经典电动力学理论来说明。但是,通常这全套理论很难实际应用,必需先假定简单模型。几何光学的模型最为容易使用。
相对论代考
上至高压线,下至发电机,只要用到电的地方就有相对论效应存在!相对论是关于时空和引力的理论,主要由爱因斯坦创立,相对论的提出给物理学带来了革命性的变化,被誉为现代物理性最伟大的基础理论。
流体力学代考
流体力学是力学的一个分支。 主要研究在各种力的作用下流体本身的状态,以及流体和固体壁面、流体和流体之间、流体与其他运动形态之间的相互作用的力学分支。
随机过程代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其取值随着偶然因素的影响而改变。 例如,某商店在从时间t0到时间tK这段时间内接待顾客的人数,就是依赖于时间t的一组随机变量,即随机过程
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。