如果你也在 怎样代写电动力学Electrodynamics这个学科遇到相关的难题,请随时右上角联系我们的24/7代写客服。电动力学Electrodynamics研究与运动中的带电体和变化的电场和磁场有关的现象;由于运动的电荷会产生磁场,所以电动力学关注磁、电磁辐射和电磁感应等效应,包括发电机和电动机等实际应用。
电动力学Electrodynamics电动力学的这一领域,通常被称为经典电动力学,是由物理学家詹姆斯-克拉克-麦克斯韦首次系统地解释的。麦克斯韦方程,一组微分方程,非常普遍地描述了这个领域的现象。最近的发展是量子电动力学,它的制定是为了解释电磁辐射与物质的相互作用,量子理论的规律适用于此。物理学家P. A. M. Dirac, W. Heisenberg, 和W. Pauli是制定量子电动力学的先驱者。当所考虑的带电粒子的速度与光速相当时,必须进行涉及相对论的修正;该理论的这个分支被称为相对论电动力学。它被应用于粒子加速器和电子管所涉及的现象,这些电子管承受着高电压和重电流。
my-assignmentexpert™ 电动力学Electrodynamics作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的电动力学Electrodynamics作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此电动力学Electrodynamics作业代写的价格不固定。通常在经济学专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在物理Physical作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的物理Physical代写服务。我们的专家在电动力学Electrodynamics代写方面经验极为丰富,各种电动力学Electrodynamics相关的作业也就用不着 说。
我们提供的电动力学Electrodynamics及其相关学科的代写,服务范围广, 其中包括但不限于:
物理代写|电动力学作业代写Electrodynamics代考|Hypersurfaces in Minkowski Space-Time
In the context of Newtonian mechanics the concept of degree of freedom refers to the number of Lagrangian coordinates describing the system. A particle moving in a three-dimensional space, for example, carries three degrees of freedom in that, one would say, at any instant $t$ its position is specified by the three coordinates $\mathbf{y}(t)=(x(t), y(t), z(t))$. We can actually analyze the system from a different point of view, asking the question: how many initial data, say at time $t=0$, must we fix in order to predict the position of the particle at any time $t$ ? The answer – six, not three – is strictly tied to the dynamics of the system, specified by Newton’s second law
$$
m \ddot{\mathbf{y}}=\mathbf{F}(\mathbf{y}, \dot{\mathbf{y}}, t) .
$$
This equation corresponds indeed to a system of three second-order differential equations and admits, hence, a unique solution, once we impose the six initial data $\mathbf{y}(0)$ and $\dot{\mathbf{y}}(0)$. An equivalent manner to describe the dynamics of the system is offered by the Hamiltonian formalism, a framework complementary to the Lagrangian formalism implicitly employed above, in which the position $\mathbf{y}(t)$ and the velocity $\mathbf{v}(t)$, spanning the phase space, are considered as independent variables. In this framework one imposes the six first-order differential equations
$$
m \dot{\mathbf{v}}=\mathbf{F}(\mathbf{y}, \mathbf{v}, t), \quad \dot{\mathbf{y}}=\mathbf{v},
$$
which admit a unique solution once the initial data $\mathbf{y}(0)$ and $\mathbf{v}(0)$ have been specified. In the Hamiltonian formalism the system appears, thus, as a system of $s i x$ degrees of freedom. We realize so that the common statement “a particle carries three degrees of freedom” actually means “three degrees of freedom of the second order”. Equivalently we could, in fact, say that the particle carries six degrees of freedom of the first order. The preference for the first convention – commonly adopted in physics – stems primarily from the peculiar relation existing between the degrees of freedom of a classical field and the particles associated to it at the quantum level, see the end of Sect. 5.1.2. Henceforth, with the term degree of freedom we will always understand degree of freedom of the second order, if not differently specified.
物理代写|电动力学作业代写Electrodynamics代考|Degrees of Freedom in Field Theory
In field theory the fundamental variables are the fields, and from a mechanical point of view each field corresponds to a system of infinite degrees of freedom. Preserving the analogy with Newtonian mechanics based on Eq. (5.1) – while adapting the perspective – we give the following definition.
Definition. We say that a real field $\varphi(t, \mathbf{x})$ carries one degree of freedom if the equations of motion governing its dynamics are such that, once the data $\varphi(0, \mathbf{x})$ and $\partial_{0} \varphi(0, \mathbf{x})$ are known for every $\mathbf{x}$, they determine the field $\varphi(t, \mathbf{x})$ for any $t$ and for any $x$.
As prototype of such an equation we consider the partial differential equation for a scalar field
$$
\square \varphi=P(\varphi)
$$
where
$$
\square=\partial_{\mu} \partial^{\mu}=\partial_{0}^{2}-\nabla^{2}
$$
is the d’Alembertian operator – a relativistic completion of the Laplacian – and $P(\varphi)$ is a polynomial in $\varphi$. Equation (5.2) is of second order in the time derivatives and we expect, hence, that it confers to $\varphi$ one degree of freedom. To confirm this expectation explicitly we fix the initial data
$$
\varphi(0, \mathbf{x}), \quad \partial_{0} \varphi(0, \mathbf{x})
$$
and attempt to determine $\varphi(t, \mathbf{x})$ enforcing Eq. (5.2). Assuming that the solution is an analytic function of $t$ we perform a Taylor expansion around $t=0$
$$
\varphi(t, \mathbf{x})=\sum_{n=0}^{\infty} \frac{\partial_{0}^{n} \varphi(0, \mathbf{x})}{n !} t^{n}
$$
and try to determine its coefficients using (5.2). The coefficients relative to $n=0$ and $n=1$ correspond to the initial data (5.3). The coefficient relative to $n=2$ can be determined evaluating $(5.2)$ at $t=0$
$$
\partial_{0}^{2} \varphi(0, \mathbf{x})=\nabla^{2} \varphi(0, \mathbf{x})+P(\varphi(0, \mathbf{x}))
$$
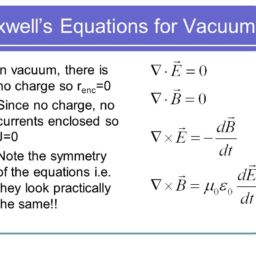
物理代写|电动力学作业代写ELECTRODYNAMICS代考|Cauchy Problem for Maxwell’s Equations
In this section we formulate the Cauchy problem relative to the Maxwell equations (2.21) and (2.22). In doing so we will establish how many, and which ones, are the degrees of freedom associated with the electromagnetic field. For this purpose it is convenient to adopt the strategy outlined in Sect. 2.2.4, consisting in the solution of the Bianchi identity in terms of a vector potential $A^{\mu}$, see (2.46). Accordingly, the system of equations we must solve can be written schematically as
$$
\partial_{\mu} F^{\mu \nu}=j^{\nu}, \quad F^{\mu \nu}=\partial^{\mu} A^{\nu}-\partial^{\nu} A^{\mu}, \quad A^{\mu} \approx A^{\mu}+\partial^{\mu} \Lambda
$$
where, we recall, the last relation signals that $A^{\mu}$ is defined modulo gauge transformations.
Asymptotic conditions. Before proceeding any further, we specify the class of vector potentials and currents that we consider physically acceptable. First of all we assume that the four-current is known and fulfils the conservation law $\partial_{\mu} j^{\mu}=0$. Furthermore, we suppose that $j^{\mu}$ has compact spatial support, as it happens for all charge distributions realizable in nature. More precisely we require that
$$
j^{\mu}(t, \mathbf{x})=0, \quad \text { for all }|\mathbf{x}|>l
$$
where the radius $l$ may depend on $t$, as it happens, for example, for a charged particle following an unbounded trajectory. Correspondingly, we will accept as physical solutions of Maxwell’s equations only the vector potentials which for any fixed $t$ vanish (sufficiently fast) at spatial infinity
$$
\lim _{|\mathbf{x}| \rightarrow \infty} A^{\mu}(t, \mathbf{x})=0
$$
电动力学代写
物理代写|电动力学作业代写ELECTRODYNAMICS代考|HYPERSURFACES IN MINKOWSKI SPACE-TIME
在牛顿力学的上下文中,自由度的概念是指描述系统的拉格朗日坐标的数量。例如,在三维空间中运动的粒子具有三个自由度,人们会说,在任何时刻吨它的位置由三个坐标指定是(吨)=(X(吨),是(吨),和(吨)). 我们实际上可以从不同的角度分析系统,问一个问题:有多少初始数据,比如说一次吨=0,我们是否必须固定才能随时预测粒子的位置吨? 答案——六个,而不是三个——与牛顿第二定律所规定的系统动力学密切相关
米是¨=F(是,是˙,吨).
这个方程确实对应于一个由三个二阶微分方程组成的系统,因此,一旦我们强加六个初始数据,它就有一个唯一解是(0)和是˙(0). 哈密顿形式主义提供了一种描述系统动力学的等效方式,这是一个与上面隐含使用的拉格朗日形式主义互补的框架,其中位置是(吨)和速度在(吨),跨越相空间,被视为自变量。在这个框架中,一个强加了六个一阶微分方程
米在˙=F(是,在,吨),是˙=在,
一旦初始数据承认一个唯一的解决方案是(0)和在(0)已指定。因此,在哈密顿形式主义中,系统表现为一个系统s一世X自由程度。我们意识到,常见的说法“一个粒子带有三个自由度”实际上意味着“二阶的三个自由度”。实际上,等效地,我们可以说粒子具有六个一阶自由度。对第一个约定的偏爱——在物理学中普遍采用——主要源于经典场的自由度与在量子水平上与之相关的粒子之间存在的特殊关系,参见第 3 节的结尾。5.1.2. 此后,如果没有不同的说明,我们将始终使用术语自由度来理解二阶自由度。
物理代写|电动力学作业代写ELECTRODYNAMICS代考|DEGREES OF FREEDOM IN FIELD THEORY
在场论中,基本变量是场,从力学的角度来看,每个场对应于一个无限自由度的系统。保留与基于方程式的牛顿力学的类比。5.1——在调整视角的同时——我们给出以下定义。
定义。我们说一个真实的领域披(吨,X)如果控制其动力学的运动方程是这样的,则具有一个自由度,一旦数据披(0,X)和∂0披(0,X)众所周知X, 他们决定了场披(吨,X)对于任何吨并且对于任何X.
作为此类方程的原型,我们考虑标量场的偏微分方程
披=磷(披)
在哪里
=∂μ∂μ=∂02−∇2
是 d’Alembertian 算子 – 拉普拉斯算子的相对论完成 – 和磷(披)是多项式披. 方程5.2在时间导数中是二阶的,因此我们期望它赋予披一个自由度。为了明确地确认这个期望,我们修复了初始数据
披(0,X),∂0披(0,X)
并试图确定披(吨,X)执行方程式。5.2. 假设解是一个解析函数吨我们在周围进行泰勒展开吨=0
披(吨,X)=∑n=0∞∂0n披(0,X)n!吨n
并尝试使用5.2. 相关系数n=0和n=1对应初始数据5.3. 相对于的系数n=2可以确定评估(5.2)在吨=0
∂02披(0,X)=∇2披(0,X)+磷(披(0,X))
物理代写|电动力学作业代写ELECTRODYNAMICS代考|CAUCHY PROBLEM FOR MAXWELL’S EQUATIONS
在本节中,我们制定了与麦克斯韦方程相关的柯西问题2.21和2.22. 在此过程中,我们将确定与电磁场相关的自由度有多少以及哪些。为此,采用第 3 节中概述的策略很方便。2.2.4,包括在向量势方面的 Bianchi 恒等式的解一种μ, 看2.46. 因此,我们必须求解的方程组可以简写为
∂μFμν=jν,Fμν=∂μ一种ν−∂ν一种μ,一种μ≈一种μ+∂μΛ
我们记得,最后一个关系表明一种μ定义模规范变换。
渐近条件。在继续之前,我们指定我们认为物理上可接受的矢量势和电流的类别。首先我们假设四电流是已知的并且满足守恒定律∂μjμ=0. 此外,我们假设jμ具有紧凑的空间支持,因为它发生在自然界中可实现的所有电荷分布。更准确地说,我们要求
$$
j^{\mu}(t, \mathbf{x})=0, \quad \text { for all }|\mathbf{x}|>l
$$
半径在哪里l可能取决于吨,例如,对于遵循无界轨迹的带电粒子。相应地,我们将接受麦克斯韦方程组的物理解只有矢量势,对于任何固定的吨消失s在FF一世C一世和n吨l是F一种s吨在空间无限
$$
\lim _{|\mathbf{x}| \rightarrow \infty} A^{\mu}(t, \mathbf{x})=0
$$

物理代写|电动力学作业代写Electrodynamics代考 请认准UprivateTA™. UprivateTA™为您的留学生涯保驾护航。
电磁学代考
物理代考服务:
物理Physics考试代考、留学生物理online exam代考、电磁学代考、热力学代考、相对论代考、电动力学代考、电磁学代考、分析力学代考、澳洲物理代考、北美物理考试代考、美国留学生物理final exam代考、加拿大物理midterm代考、澳洲物理online exam代考、英国物理online quiz代考等。
光学代考
光学(Optics),是物理学的分支,主要是研究光的现象、性质与应用,包括光与物质之间的相互作用、光学仪器的制作。光学通常研究红外线、紫外线及可见光的物理行为。因为光是电磁波,其它形式的电磁辐射,例如X射线、微波、电磁辐射及无线电波等等也具有类似光的特性。
大多数常见的光学现象都可以用经典电动力学理论来说明。但是,通常这全套理论很难实际应用,必需先假定简单模型。几何光学的模型最为容易使用。
相对论代考
上至高压线,下至发电机,只要用到电的地方就有相对论效应存在!相对论是关于时空和引力的理论,主要由爱因斯坦创立,相对论的提出给物理学带来了革命性的变化,被誉为现代物理性最伟大的基础理论。
流体力学代考
流体力学是力学的一个分支。 主要研究在各种力的作用下流体本身的状态,以及流体和固体壁面、流体和流体之间、流体与其他运动形态之间的相互作用的力学分支。
随机过程代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其取值随着偶然因素的影响而改变。 例如,某商店在从时间t0到时间tK这段时间内接待顾客的人数,就是依赖于时间t的一组随机变量,即随机过程
Matlab代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。