如果你也在为遇到的matlab相关的难题发愁,请随时右上角联系我们的24/7代写客服。MATLAB®将为迭代分析和设计过程而调整的桌面环境与直接表达矩阵和阵列数学的编程语言相结合。它包括用于创建脚本的实时编辑器,这些脚本将代码、输出和格式化文本结合在可执行的笔记本中。
- 专业构建
MATLAB工具箱是专业开发的,经过严格的测试,并有完整的文件记录。 - 拥有互动式应用程序
MATLAB应用程序让您看到不同的算法是如何与您的数据一起工作的。迭代直到您得到您想要的结果,然后自动生成一个MATLAB程序来重现或自动完成您的工作。 - 以及扩展的能力
只需稍加修改代码,就可以将您的分析扩展到集群、GPU和云上运行。不需要重写你的代码或学习大数据编程和内存外技术。
my-assignmentexpert™ matlab作业代写,免费提交作业要求, 满意后付款,成绩80\%以下全额退款,安全省心无顾虑。专业硕 博写手团队,所有订单可靠准时,保证 100% 原创。my-assignmentexpert™, 最高质量的matlab作业代写作业代写,服务覆盖北美、欧洲、澳洲等 国家。 在代写价格方面,考虑到同学们的经济条件,在保障代写质量的前提下,我们为客户提供最合理的价格。 由于统计Statistics作业种类很多,同时其中的大部分作业在字数上都没有具体要求,因此matlab作业代写作业代写的价格不固定。通常在matlab专家查看完作业要求之后会给出报价。作业难度和截止日期对价格也有很大的影响。
想知道您作业确定的价格吗? 免费下单以相关学科的专家能了解具体的要求之后在1-3个小时就提出价格。专家的 报价比上列的价格能便宜好几倍。
my-assignmentexpert™ 为您的留学生涯保驾护航 在matlab作业代写方面已经树立了自己的口碑, 保证靠谱, 高质且原创的应用数学applied math代写服务。我们的专家在matlab作业代写方面经验极为丰富,各种matlab作业代写相关的作业也就用不着 说。
我们提供的matlab作业代写及其相关学科的代写,服务范围广, 其中包括但不限于:
- 数据分析
- 数值与符号计算
- 工程与科学绘图
- 控制系统设计
- 航天工业
- 汽车工业
- 生物医学工程
- 语音处理
运筹学代写
数学代写|matlab作业代写|Kinematic Pairs
Linkages are made up of links and joints and are basic elements of mechanisms and robots. A link (element or member) is a rigid body with nodes. The nodes are points at which links can be connected. Figure $1.1$ shows a link with two nodes, a binary link. The links with three nodes are ternary links. A kinematic pair or a joint is the connection between two or more links. The kinematic pairs give relative motion between the joined elements. The degree of freedom of the kinematic pair is the number of independent coordinates that establishes the relative position of the joined links.
A joint has $(6-i)$ degrees of freedom where $i$ is the number of restricted relative movements. A planar one degree of freedom kinematic pair, $c_{5}$, removes 5 degrees of freedom and allows one degree of freedom. The planar two degrees of freedom kinematic pair, $c_{4}$, has two degrees of freedom and removes 4 degrees of freedom. To find the degrees of freedom of a kinematic pair one element is hold to be a reference link and the position of the other element is found with respect to the reference link. Figure 1.2a shows a slider (translational or prismatic) joint that allows one translation (T) degree of freedom between the elements 1 and 2 . Figure $1.2 \mathrm{~b}$ represents a rotating pin (rotational or revolute) joint that allows one rotational (R) degree of freedom between links 1 and 2 . The slider and the pin joints are $c_{5}$ joints. The $c_{5}$ joints allow one degrees of freedom and is called full-joint. For the two degrees of freedom joints, $c_{4}$, there are two independent, relative motions, translation (T) and rotation (R), between the joined links. Two degrees of freedom joints are shown in Fig. 1.3. The two degrees of freedom joint is called half-joint and has 4 degrees of constraint. For a planar system there are two kinds of joints $c_{5}$ and $c_{4}$. A joystick (ball-and-socket joint, or a sphere joint) is a three degrees of freedom joint ( 3 degrees of constraint,
数学代写|matlab作业代写|Degrees of Freedom
The number of independent variables that uniquely defines the position of a mechanical system in space at any time is defined as the number of degrees of freedom (DOF). The number of DOF is stated about a reference frame.
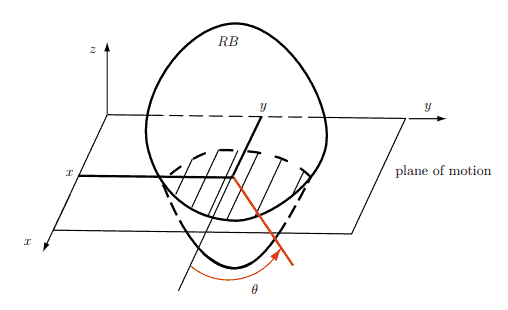
Figure $1.4$ represents a rigid body (RB) moving on $x y$-plane. The distance between any two particles on a rigid body is constant at any time. Three DOF are needed to define the position of a free rigid body in planar motion: two linear coordinates $(x, y)$ to define the position of a point on the rigid body, and one angular coordinate $(\theta)$ to define the angle of the body with respect to the reference axes. The particular selection of the independent measurements to define its position is not unique. A free rigid body moving in a three-dimensional (3-D) space has six DOF: three lengths $(x, y, z)$, and three angles $\left(\theta_{x}, \theta_{y}, \theta_{z}\right)$. Next only the two-dimensional motion will be presented. A rigid body in planar motion has pure rotation, if the body possesses one point (center of rotation) that has no motion with respect to a fixed reference frame. The points on the body describe arcs with respect to its center. A rigid body in planar motion has pure translation if all points on the body describe parallel paths. A rigid body in planar motion has complex or general plane motion if it has a simultaneous combination of rotation and translation. The points on the body in general plane motion describe non-parallel paths at an instantaneous center of rotation will change its position.
matlab代写
数学代写|MATLAB作业代写|KINEMATIC PAIRS
连杆由连杆和关节组成,是机构和机器人的基本元件。一条链接和一世和米和n吨○r米和米b和r是一个有节点的刚体。节点是可以连接链接的点。数字1.1显示具有两个节点的链接,即二元链接。具有三个节点的链接是三元链接。运动学副或关节是两个或多个连杆之间的连接。运动学对给出连接元素之间的相对运动。运动学副的自由度是建立连接链接相对位置的独立坐标的数量。
一个关节有(6−一世)自由度一世是限制相对运动的次数。平面一自由度运动副,C5, 去除 5 个自由度并允许 1 个自由度。平面二自由度运动副,C4, 有两个自由度,去掉 4 个自由度。为了找到运动学对的自由度,将一个元素保持为参考链接,并找到另一个元素相对于参考链接的位置。图 1.2a 显示了一个滑块吨r一种ns一世一种吨一世○n一种一世○rpr一世s米一种吨一世C允许一次翻译的关节吨元素 1 和 2 之间的自由度。数字1.2 b代表旋转销r○吨一种吨一世○n一种一世○rr和v○一世你吨和允许一个旋转的关节R链接 1 和 2 之间的自由度。滑块和销接头是C5关节。这C5关节允许一个自由度,称为全关节。对于两个自由度关节,C4,有两个独立的相对运动,平移吨和旋转R, 在连接的链接之间。两个自由度关节如图 1.3 所示。两个自由度的关节称为半关节,有4个约束度。对于平面系统,有两种关节C5和C4. 操纵杆b一种一世一世−一种nd−s○C到和吨j○一世n吨,○r一种spH和r和j○一世n吨是一个三自由度关节( 3 个约束度,
数学代写|MATLAB作业代写|DEGREES OF FREEDOM
任何时候唯一地定义一个机械系统在空间中位置的自变量的个数定义为自由度的个数D○F. 自由度的数量是关于参考系的。
数字1.4表示刚体R乙继续X和-飞机。刚体上任意两个粒子之间的距离在任何时候都是恒定的。需要三个自由度来定义平面运动中自由刚体的位置:两个线性坐标(X,和)定义刚体上一点的位置,以及一个角坐标(θ)定义主体相对于参考轴的角度。确定其位置的独立测量的特定选择不是唯一的。一个在三维空间中运动的自由刚体3−D空间有六个自由度:三个长度(X,和,和), 和三个角(θX,θ和,θ和). 接下来只介绍二维运动。平面运动的刚体具有纯旋转,如果该刚体拥有一个点C和n吨和r○Fr○吨一种吨一世○n相对于固定参考系没有运动。身体上的点描述了相对于其中心的弧线。如果刚体上的所有点都描述平行路径,则平面运动中的刚体具有纯平移。平面运动中的刚体如果同时具有旋转和平移的组合,则它具有复杂或一般的平面运动。一般平面运动中身体上的点描述了在瞬时旋转中心处的非平行路径将改变其位置。
统计代考
统计是汉语中的“统计”原有合计或汇总计算的意思。 英语中的“统计”(Statistics)一词来源于拉丁语status,是指各种现象的状态或状况。
数论代考
数论(number theory ),是纯粹数学的分支之一,主要研究整数的性质。 整数可以是方程式的解(丢番图方程)。 有些解析函数(像黎曼ζ函数)中包括了一些整数、质数的性质,透过这些函数也可以了解一些数论的问题。 透过数论也可以建立实数和有理数之间的关系,并且用有理数来逼近实数(丢番图逼近)
数值分析代考
数值分析NumericalAnalysis,又名“计算方法”,是研究分析用计算机求解数学计算问题的数值计算方法及其理论的学科。 它以数字计算机求解数学问题的理论和方法为研究对象,为计算数学的主体部分。
随机过程代写
随机过程,是依赖于参数的一组随机变量的全体,参数通常是时间。 随机变量是随机现象的数量表现,其取值随着偶然因素的影响而改变。 例如,某商店在从时间t0到时间tK这段时间内接待顾客的人数,就是依赖于时间t的一组随机变量,即随机过程
MATLAB代写
MATLAB 是一种用于技术计算的高性能语言。它将计算、可视化和编程集成在一个易于使用的环境中,其中问题和解决方案以熟悉的数学符号表示。典型用途包括:数学和计算算法开发建模、仿真和原型制作数据分析、探索和可视化科学和工程图形应用程序开发,包括图形用户界面构建MATLAB 是一个交互式系统,其基本数据元素是一个不需要维度的数组。这使您可以解决许多技术计算问题,尤其是那些具有矩阵和向量公式的问题,而只需用 C 或 Fortran 等标量非交互式语言编写程序所需的时间的一小部分。MATLAB 名称代表矩阵实验室。MATLAB 最初的编写目的是提供对由 LINPACK 和 EISPACK 项目开发的矩阵软件的轻松访问,这两个项目共同代表了矩阵计算软件的最新技术。MATLAB 经过多年的发展,得到了许多用户的投入。在大学环境中,它是数学、工程和科学入门和高级课程的标准教学工具。在工业领域,MATLAB 是高效研究、开发和分析的首选工具。MATLAB 具有一系列称为工具箱的特定于应用程序的解决方案。对于大多数 MATLAB 用户来说非常重要,工具箱允许您学习和应用专业技术。工具箱是 MATLAB 函数(M 文件)的综合集合,可扩展 MATLAB 环境以解决特定类别的问题。可用工具箱的领域包括信号处理、控制系统、神经网络、模糊逻辑、小波、仿真等。